 |
||||
|
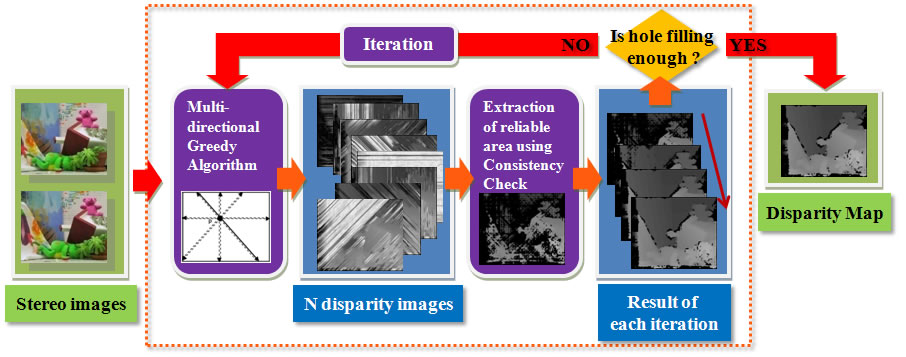
Fig.1 Flow of the MuGSM |
||||
| > Objects | ||||
| To obtain depth image from stereo images, we use stereo matching algorithm. | ||||
| For a long time, many stereo matching algorithms have been developed. | ||||
| And the performance are improving. But algorithms have weak points. | ||||
| Those are long computation time, memory consuming, and scan line problem. | ||||
| To solve these problems is the objects and motives. | ||||
| We proposed an algorithm, whose accuracy is as good as SGM. | ||||
| But, the computation time is shorter, and memory usage is smaller. | ||||
| > Multi-directional Greedy | ||||
|
Make disparity maps using Greedy matching along 8 or 16 directions. |
||||
 |
 |
|||
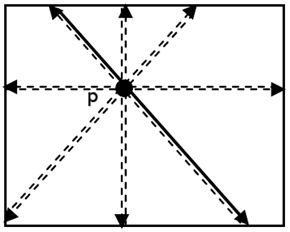
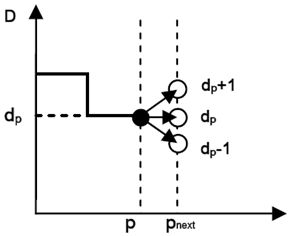
| Fig 2. Matching directions | Fig 3. Range of disparity | |||
| Number of matching direction is 8 or 16. | The relation between current disparity and next disparity. | |||
| > Consistency Check | ||||
| Find reliable area from greedy results using consisteny check. | ||||
 |
||||
| Fig 4. Results of each greedy matching through 8 matching directions | ||||
| Red point and blue point at each result mean same position of the original image. | ||||
 |
||||
| Fig 5. Consistency check | ||||
| Red points : The rate of inlier is higher than Consistency_ratio. | ||||
| Blue points : The rate of inlier is smaller than Consistency_ratio. | ||||
| > Iterative Expansion | ||||
| 1) After first ‘Consistency check’ get the reliable area | ||||
| 2) Restart Multi-directional Greedy Matching using reliable area. | ||||
| 3) Consistency check for the result of process 2. | ||||
| 4) Only in the holes(unreliable area), Iterate processes(2~3) are executed. | ||||
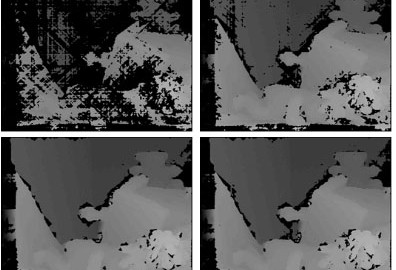
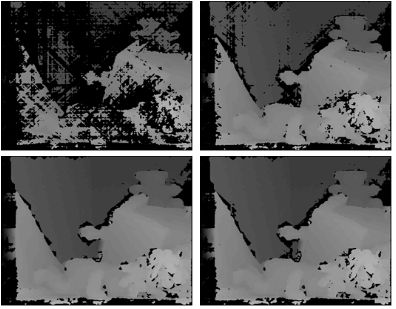 |
||||
| Fig 6. results of 1st iteration, 2nd iteration, 3th iteration, 4th iteration (from left-top, clockwise) | ||||
| > Result | ||||
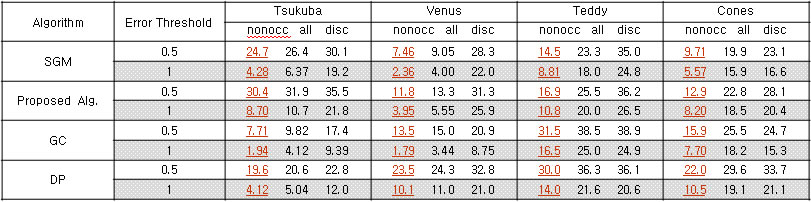
| Computation time is 2~3 times faster than SGM’s. Memory usage is about 33% comparing to SGM’s. Accuracy almost equal. | ||||
 |
||||
| Table 1. Compare with other stereo algorithms | ||||
 |
||||
| Table 2. Memory usage | ||||
 |
||||
| Table 3. Computation time | ||||
 |
||||
MuGSM (Multi-Directional Greedy Stereo Matching)
MuGSM(Multi-directional Greedy Stereo Matching)은 두 대의 카메라에서 획득한 영상으로