♦ 컴퓨터/로봇 비전(Computer/Robot Vision) 이란? |
|
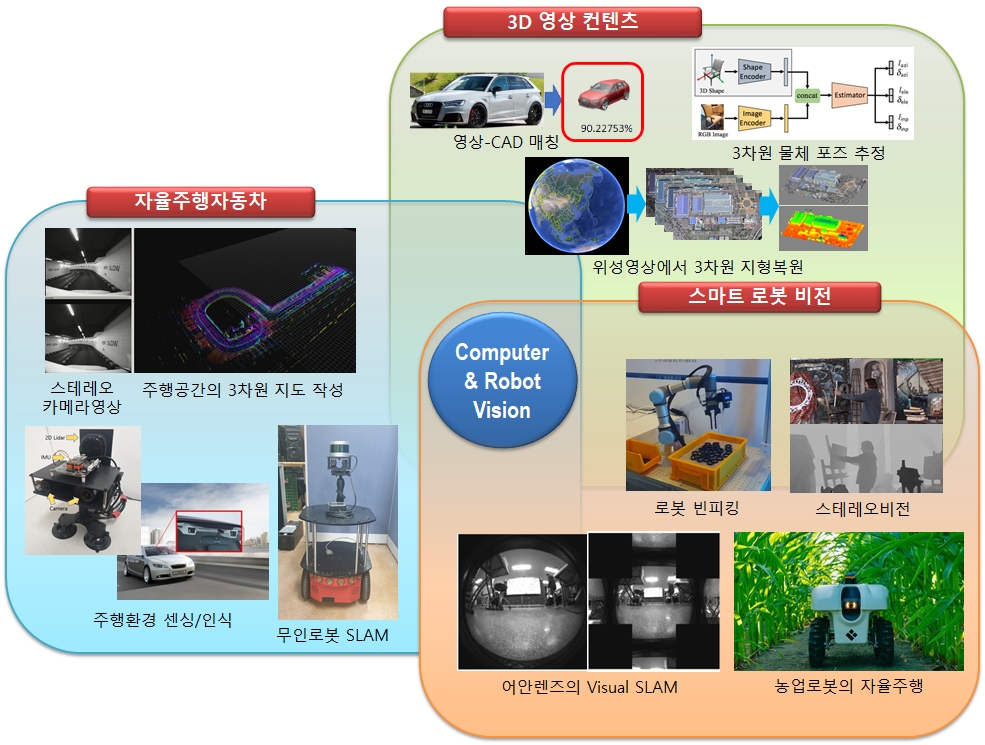
컴퓨터 및 로봇 비전 기술은 카메라 영상으로부터 사람이나 물체에 대한 2차원 또는 3차원 정보를 획득하여 산업에 활용하거나 일상 생활에 유용한 서비스를 제공하는 기술에 관한 학문입니다. 특히 우리 연구실은 3차원 비전기술에 대한 연구 및 개발에 많은 관심을 가지고 있습니다. 3차원 컴퓨터 및 로봇비전 기술은 다음과 같은 응용분야가 있습니다.
|
|
|
♦ 경북대학교 컴퓨터 및 로봇비전 연구실의 연구분야는? |
|
우리 연구실은 3차원 ‘로봇 및 컴퓨터 비전’ 연구에서 3차원 데이터의 획득, 3차원 데이터의 처리, 그리고 3차원 데이터의 응용 등 3차원 영상 및 깊이정보를 이용한 전반적인 연구를 수행하고 있습니다. 3D Image Acquisition (3D Scanning)
다양한 센서와 비전 카메라를 사용하여 사람이나 물체의 3차원 형상과 색상 정보를 획득합니다. 3차원 정보의 획득은 정밀하고 빠르게 획득되어야 합니다. 우리 연구실에서는 정밀도가 높고 속도가 빠른 다양한 3차원 스캐닝 기술을 연구하고 있습니다. 3D Data Processing
3차원 센서로 획득한 데이터를 처리하여 새로운 형태의 데이터를 생성하거나 오차가 작은 데이터로 변환이 필요합니다. 그리고 서로 다른 센서에서 획득한 3차원 데이터를 합성하여 하나의 데이터를 생성하는 기술이 필요합니다. 3D Application
3차원 데이터의 획득 및 처리 기술을 이용하여 다양한 분야에 적용할 수 있습니다. 우리 연구실은 다음과 같은 응용 분야에 대한 연구를 진행하고 있습니다. 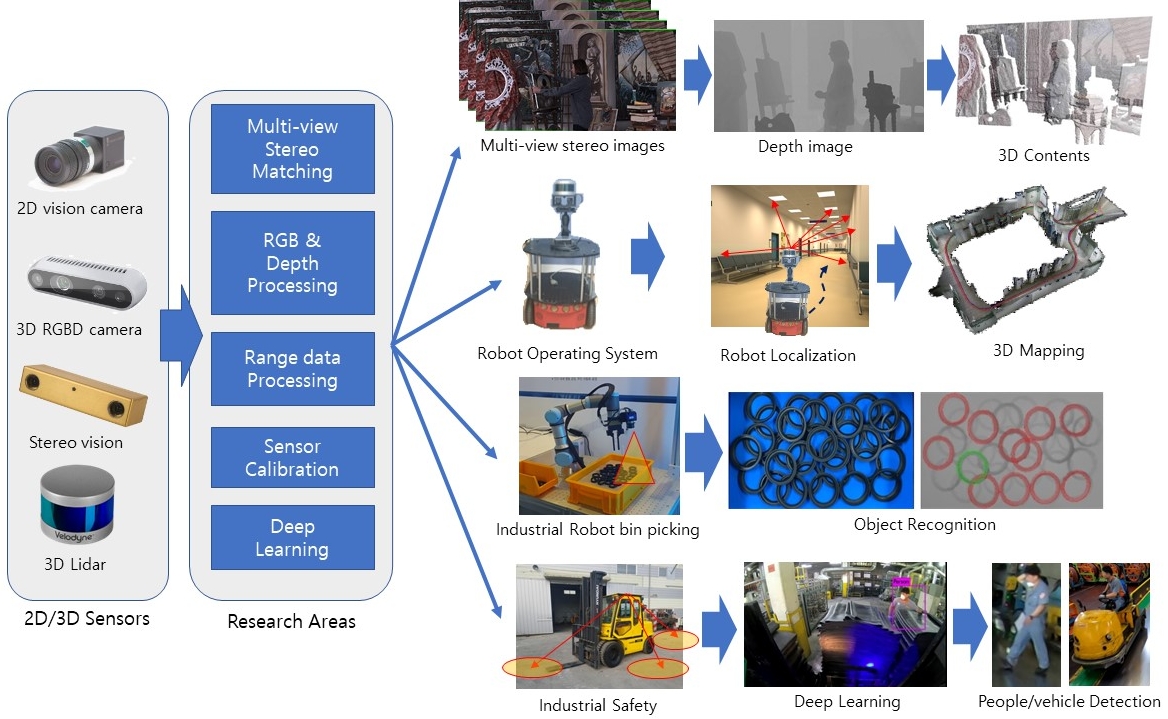 3D Scanning, Processing, and Applications
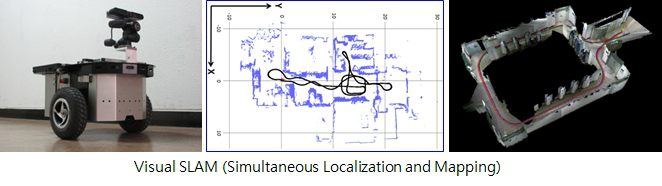
– 카메라 영상을 이용한 무인 로봇의 위치인식 (Visual SLAM)
 – 자율주행자동차의 3차원 주행지도 작성을 위한 모바일 매핑 시스템 (MMS)
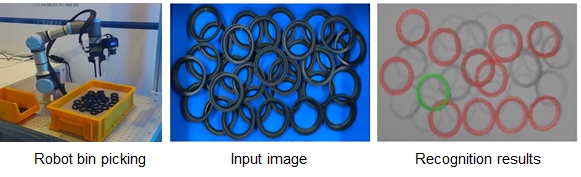
 – 3차원 센서를 사용한 로봇의 자동 빈피킹
 |