Introduction
Human respiration induces considerable external and internal motion in the thoracic and abdominal regions. Tracking and modeling of this motion is an important task for accurate treatment planning and dose calculation during external beam radiotherapy. Inaccurate motion tracking can cause severe issues such as errors in target/normal tissue delineation and increment in the volume of healthy tissues exposed to high doses. Different methods have been introduced to model the respiratory motion, but most of them use wearable markers or surgical node implanting techniques, which are inconvenient to patients.
In this research, we experiment the feasibility of using a commercial RGB-D camera along with Principal Component Analysis (PCA) to track and model the subject-specific external respiratory motion. Marker-based depth frame registration technique is also introduced to limit the measuring area into an anatomically consistent region during the treatment.
Overview of the proposed method
System setup for data acquisition
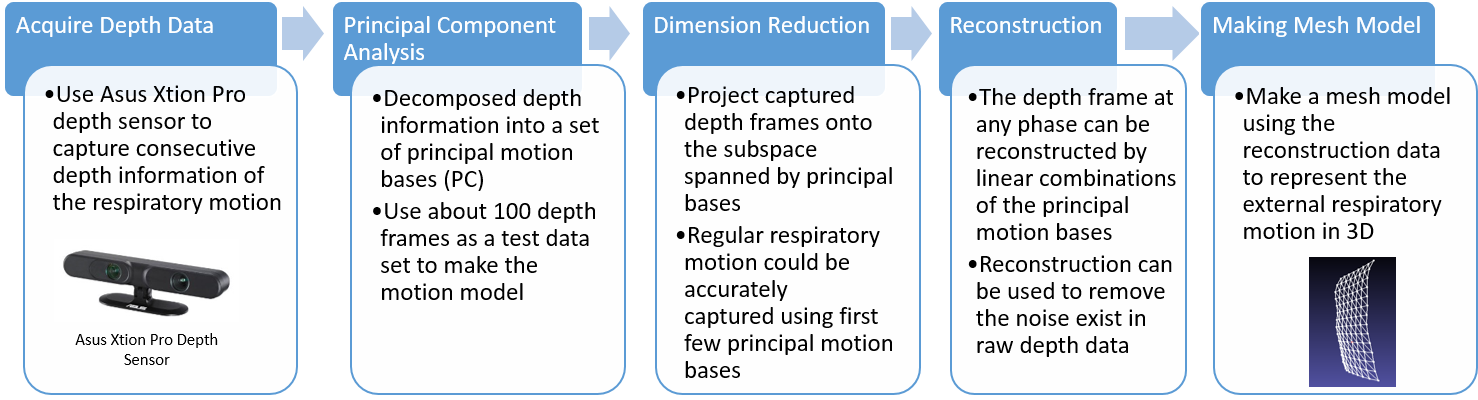
An Asus Xtion PRO depth camera is used to acquire the depth data in real time covering the whole thoracic and abdominal region of the patient. However, the coverage of the depth sensor on the chest wall is variable due to the surface motion of the chest wall and also contain a lot of unnecessary regions. In radiotherapy, intended measuring area should be anatomically consistent during the whole treatment time for delivering the radiation dose accurately. Therefore, we attached four dot markers to the chest wall of the patient to define a consistent measuring area.

Process of rectangular ROI generation

(a) Captured visual image. (b) After binarization using Otsu’s method. (c) Defining the measuring area after finding the center coordinates of the four markers. (d) Identified measuring area projected onto the aligned depth image. (e) Generated rectangular ROI using perspective transformation.
Principal Component Analysis
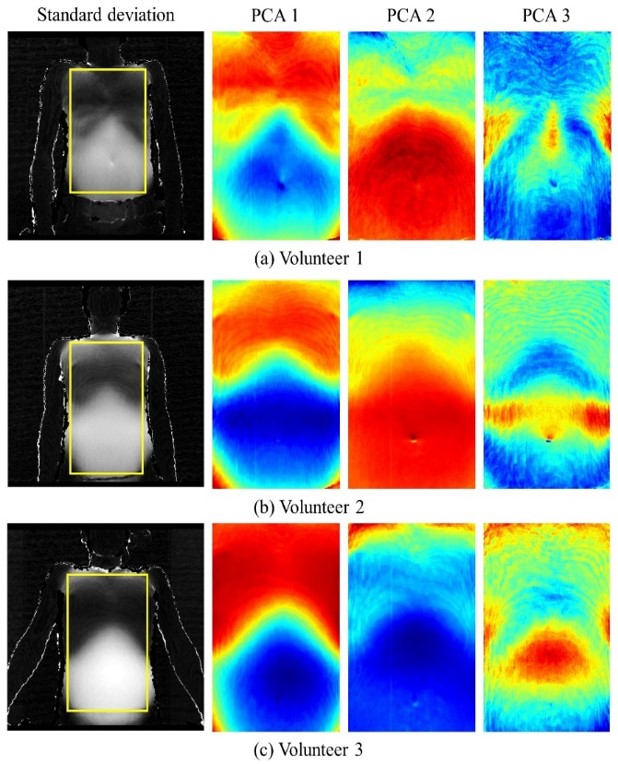
After acquiring the depth data, PCA is applied to capture the respiratory motion signal which is integrated into the major principal components. According to the observation on several input data, the first eigenvalue dominated the rest of the eigenvalues and accounted for over 95% of data variation. Therefore, only the first principal component can be used to represents the respiratory motion, significantly reducing the dimensionality of input depth data.
Respiratory motion modeling
We reconstruct the depth data, which is in the metric domain, from the projection
coefficients and use it to model the respiratory motion.
Reference
- U. Wijenayake and S. Park, “PCA Based Analysis of External Respiratory Motion Using an RGB-D Camera,” in 2016 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Benevento, Italy, 2016.
[Bibtex]@INPROCEEDINGS{wijenayake2016pca, AUTHOR="Udaya Wijenayake and Soon-Yong Park", TITLE="{PCA} Based Analysis of External Respiratory Motion Using an {RGB-D} Camera", BOOKTITLE="2016 IEEE International Symposium on Medical Measurements and Applications (MeMeA)", ADDRESS="Benevento, Italy", DAYS=14, MONTH=may, YEAR=2016, KEYWORDS="Respiratory motion, PCA, RGB-D camera", ABSTRACT="Human respiration induces considerable external and internal motion in the thoracic and abdominal regions. Tracking and modeling of this motion is an important task for accurate treatment planning and dose calculation during external beam radiotherapy. Inaccurate motion tracking can cause severe issues such as errors in target/normal tissue delineation and increment in the volume of healthy tissues exposed to high doses. Different methods have been introduced to model the respiratory motion, but most of them use wearable markers or surgical node implanting techniques, which are inconvenient to patients. In this paper, we experiment the feasibility of using an RGB-D camera along with Principal Component Analysis (PCA) to track and model the subject-specific external respiratory motion. Marker-based depth frame registration technique is also introduced to limit the measuring area into an anatomically consistent region during the treatment. We evaluate the accuracy of the proposed method using a Spirometer and a laser line scanner." }