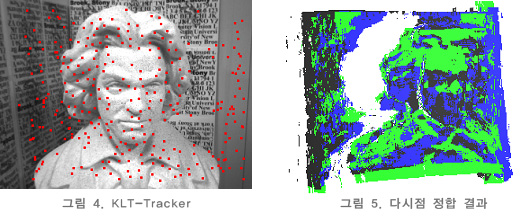
다시점 거리영상 (Multi-view Range Image)의 정합은 물체의 3차원 모델을 완전하게 복원하기위한 기술입니다. 서로 다른 시점의 거리영상을 합성하기위해서 기하학적인 정보를 사용하기도하지만 영상의 특징을 이용하여 정합을 수행하는 연구도 진행되고 있습니다. 영상특징을 이용하여 고속으로 거리영상을 정합한다면 물체의 3차원 모델을 빠른 시간에 생성할 수 있습니다.
School of Electronics Engineering, Kyungpook National University, South Korea
다시점 거리영상 (Multi-view Range Image)의 정합은 물체의 3차원 모델을 완전하게 복원하기위한 기술입니다. 서로 다른 시점의 거리영상을 합성하기위해서 기하학적인 정보를 사용하기도하지만 영상의 특징을 이용하여 정합을 수행하는 연구도 진행되고 있습니다. 영상특징을 이용하여 고속으로 거리영상을 정합한다면 물체의 3차원 모델을 빠른 시간에 생성할 수 있습니다.
스테레오 영상은 두 대 이상의 카메라를 이용하여 얻은 영상
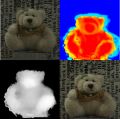
스테레오 영상은 두 대 이상의 카메라를 이용하여 얻은 영상을 말합니다. 영상을 획득한 카메라의 기하정보를 안다면 스테레오 영상에서 물체까지의 거리영상을 구할 수 있습니다. 거리영상은 컴퓨터비전에서 매우 중요한 3차원 정보를 가지고 있어 물체인식 및 추적, 3차원모델링, 로봇비전 등에 유용하게 사용될 수 있습니다.
입체카메라 또는 입체 TV기술은 차세대 컴퓨터 및 방송기술의 하나로
|
|
|
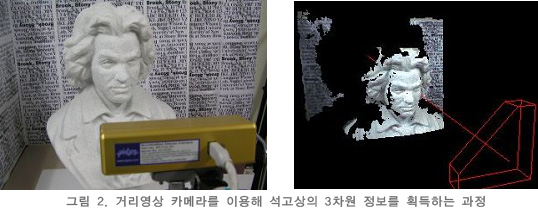
물체의 거리를 측정할 수 있는 3차원 카메라를 이용하여 다시점에서 물체의
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
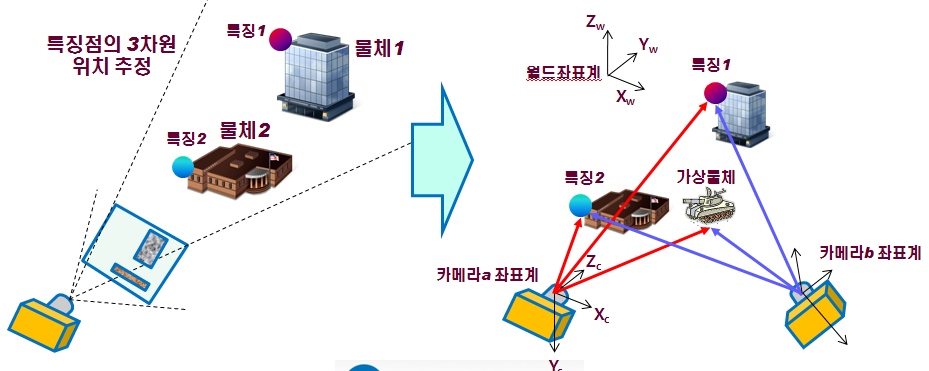
증강현실(Augmented Reality)은 3차원 가상물체(Virtual Object)를 비디오 영상과
|
|
|
|
|
 |
|
|
|
 |
|
|
|
 |
|
|
|
 |
|
|
|
 |
|
|
|
|
– Virtual object in the origin: download(WMV, 29MB) |
|