1 .Deep Learning
CNN을 이용한 빈피킹 시스템

빈피킹(Bin-picking)이란 무작위로 겹쳐 쌓인 여러 물체 중에서 개별 물체를 잡아 올리는 작업을 말한다. 빈피킹 시스템을 구현하기 위해서는 물체의 위치와 자세정보를 정확히 알아야 한다. 본 연구에서는 빈피킹 시스템을 딥러닝(Deep-Learning)과 물체의 3차원 특징 정보를 활용해서 물체의 위치정보와 자세정보를 추정하는 방법을 연구한다.

CNN을 이용한 불순물 최적 제거 경로 결정

오염된 하천 또는 해양 표면에는 많은 불순물들이 존재한다. 이러한 불순물을 인식하고 제거하기 위해 기존에는 숙련된 전문가가 직접 제거하거나, 로봇을 제어하여 제거한다. 하지만 넓은 하천이나 해양에서 불순물을 판단하고 제거하기엔 비교적 많은 인력이 요구된다. 또한 환경에 따라 인명 피해도 발생할 수 있다. 따라서 본 연구에서는 불순물 제거 작업의 자동화를 위해, 획득한 영상에서 Deep-Learning을 활용한 불순물 제거 경로 추정 방법을 연구한다.
2. 3D Scanning & Reconstruction
회전 3D 센서를 이용한 3차원 족부 스캐너

맞춤형 신발을 제작하기 위해서는, 사용자의 정밀한 발 형상 데이터가 필요하다. 발 형상 데이터를 획득하기 위해 주로 3차원 족부 스캐너를 사용한다. 시중에 공개된 3차원 족부 스캐너들은 일반적으로 카메라와 라인 레이저로 구성된 3D 센서가 선형 이동을 하며 스캔한다. 선형 이동의 특성상 하나의 3D 센서로 족부의 모든 표면을 스캔할 수 없다. 따라서 여러 개의 3D 센서를 족부 다방면에 배치하여 스캔한다. 센서의 수가 늘어남에 따라 장치의 전체 가격이 높아지는 단점이 있다. 따라서 본 연구는 회전 3D 센서를 이용한 회전 방식의 3차원 족부 스캐너를 연구한다. 회전 이동하는 하나의 3D 센서로 족부의 모든 측면을 스캔할 수 있어, 보다 적은 양의 센서로 족부 전체의 스캔이 가능하다.

3. Stereo Vision System
Stereo Vision Based 3D Pose Estimation of Product Labels

In the field of computer vision and robotics, bin picking is an important application area in which object pose estimation is necessary. Different approaches, such as 2D feature tracking and 3D surface reconstruction, have been introduced to estimate the object pose accurately. In this research, we propose a new approach where we can use both 2D image features and 3D surface information to identify the target object and estimate its pose accurately. First, we introduce a label detection technique using Maximally Stable Extremal Regions (MSERs) where the label detection results are used to identify the target objects separately. Then, the 2D image features on the detected label areas are utilized to generate 3D surface information. We calculate the 3D position and the orientation of the target objects using the information of the 3D surface.
Calibration of Stereo Gamma Camera to Estimate 3D Distance for Radioactive Sources

Radiation detection devices; also known as particle detectors; are vastly used to track and identify radioactive sources, such as Gamma, X-Ray within a given area. The 3D distance to such radioactive sources can be estimated using stereo radiation detection devices. In stereo vision, the devices should be calibrated before they are used to acquire stereo images. In this research, we introduce a new idea to calibrate a ‘Hybrid Pan/Tilt type – Stereo Gamma camera’ using Planar Homography. The calibrated cameras are then used to generate stereo gamma images, where they are treated with enhanced bilinear interpolation method for noise reduction and smoothing. 3D distance calculation experiments infer the accuracy of our research, where the overall error lies less than 3%.
4. Autonomous Vehicle
3D digital map generation using Velodyne Lidar and 6 channels omnidirectional vision cameras
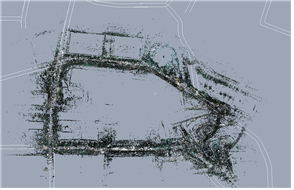
일반적인 자율 주행 자동차의 연구 방식으로는 차량 에 설치한 다양한 센서로부터 입력받은 데이터를 이용 하여 주행 차량 주변 환경을 인식하고 판단하며 제어 하는 방식을 이용한다. 하지만 이러한 방법으로는 주행 차량의 조명 환경이나 기상 환경에 따라 잘못된 데이터를 입력 받을 수 있으며 이는 자율 주행에 있어 치명적인 요소로 작용한다. 따라서 최근 자율 주행 자 동차의 최근 연구 동향으로는 라이다 센서와 카메라 센서를 이용하여 3차원 지도를 생성하여 차량이 자율 적으로 주행할 수 있는 운행 설계 영역(Operational Design Domain)을 구축하는 방향으로 연구가 진행되 고 있다. 본 연구는 ODD 구축을 위해 특정 지역에 대한 2차원 도로맵 생성 방법과 카메라와 라이다 센서를 이 용한 3차원 지도 생성 방법을 소개한다.
