|
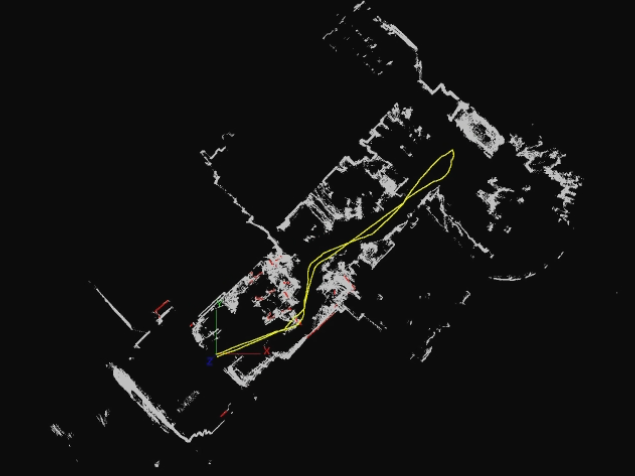
SLAM (Simultaneous Localization and Mapping) is a technique used by a mobile robot to build a map within an unknown environment and at the same time compute its current location. Our research is based on matching two consecutive 2D range scans which are obtained from a LRF (Laser Range Finder) mounted on a mobile robot.
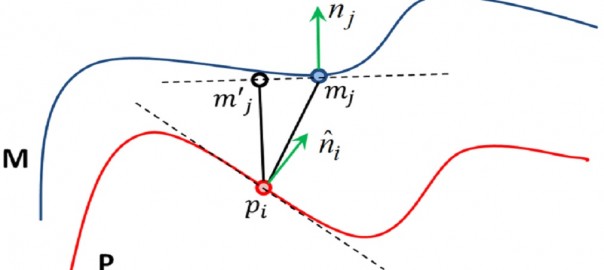
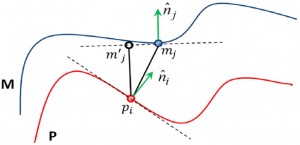
The most widely used algorithm for matching range scans is the Iterative Closest Points (ICP) algorithm. This algorithm is based on an iterative process in two steps: first a set of corresponding pairs between two consecutive scans is selected, and second the error between corresponding pairs is minimized to find the rigid-body transformation between two scans. This process is repeated until two scans are converged. The most critical part of the ICP is the establishment of corresponding point-pairs. For any point in the first scan, the conventional ICP algorithm finds the closest point in the second scan (the nearest neighbor) its correspondence.
|