Abstract
산업 자동화(Industrial Automation)는 생산/조립 공정과정을 사람이 하지 않고 기계류가 공정을 제어하는 것을 말한다. 산업용 로봇은 노동력을 제공해 제품의 품질 향상, 인건비 절감으로 원가절감을 가져오고 위험한 작업을 대신하여 인간의 삶의 질을 향상시킨다.
빈피킹(Bin-picking)이란 무작위로 겹쳐 쌓인 여러 물체 중에서 개별 물체를 잡아 올리는 작업을 말한다. 빈피킹 시스템을 구현하기 위해서는 물체의 위치와 자세정보를 정확히 알아야 한다. 본 연구에서는 빈피킹 시스템을 딥러닝(Deep-Learning)과 물체의 3차원 특징 정보를 활용해서 물체의 위치정보와 자세정보를 추정하는 방법을 연구한다.
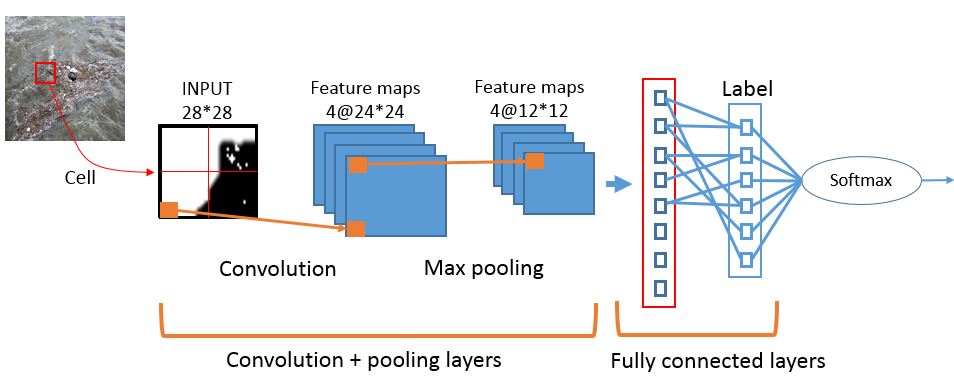
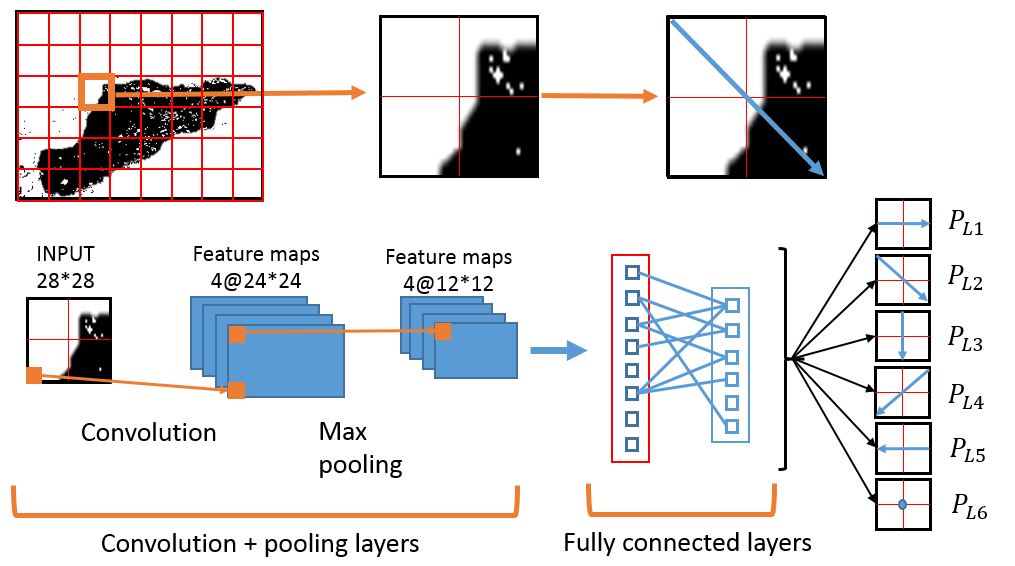
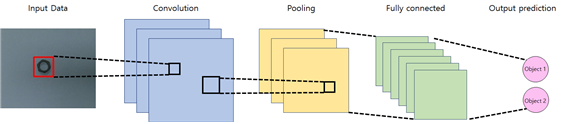
Convolution Neural Network
CNN은 다른 딥러닝 구조들에 비해 영상, 음성 분야에서 좋은 성능을 보여주는 신경망 구조이다. 또한 학습과정에서 특징 정보들을 일반화하면 다른 환경에서도 뛰어난 인식률을 보여준다. 본 연구에서는 CNN을 이용하여 물체를 학습하고 물체의 위치를 추정한다.

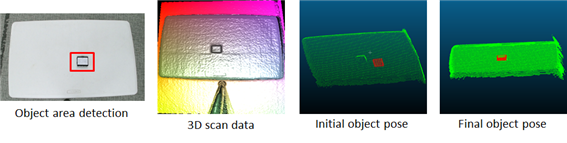
물체의 3차원 자세추정
파지할 물체의 3D CAD 정보를 이용하여 물체의 자세를 추정한다. 3D Sensor로 입력영상을 점군으로 변환한 이후 ICP 알고리즘을 통해 물체의 자세를 추정한다.