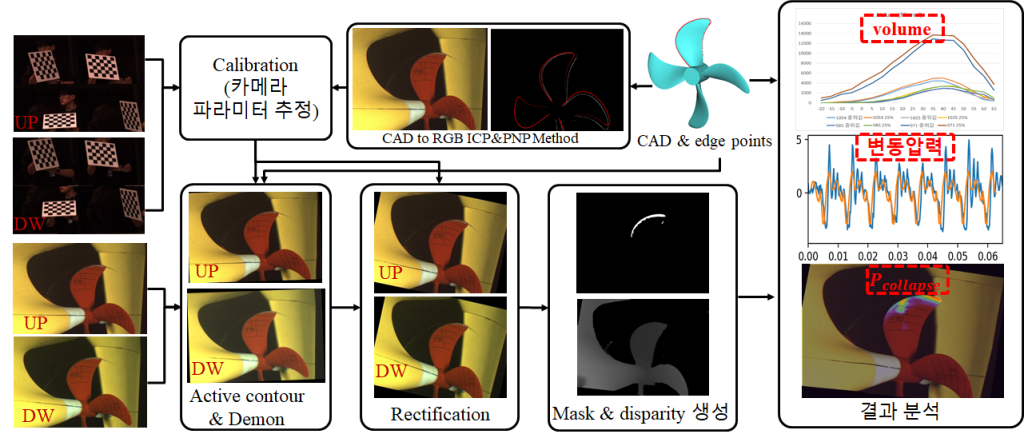
Propeller Cavitation Analysis
선박 운항 중 고속회전하는 프로펠러에서 발생하는 캐비테이션 (cavitation)현상을 카메라 영상으로 획득하고 최신 AI 기술을 사용하여 캐비테이션의 거동 특성 및 변동 압력을 예측하는 기법을 개발
- 프로펠러 영상에 발생하는 흔들림의 자동 보정
- 프로펠러 회전 각도별 Active Contour 및 Demon알고리즘 적용 흔들림 보정
- 프로펠러 회전 시 발생하는 캐비테이션의 2차원 면적 및 세기 변화 분석
- 학습 AI 네트워크를 이용한 스테레오 정합 및 캐비테이션 3차원 볼륨 분석
- 프로펠러 회전에 따른 캐비테이션 3차원 볼륨 변화 분석
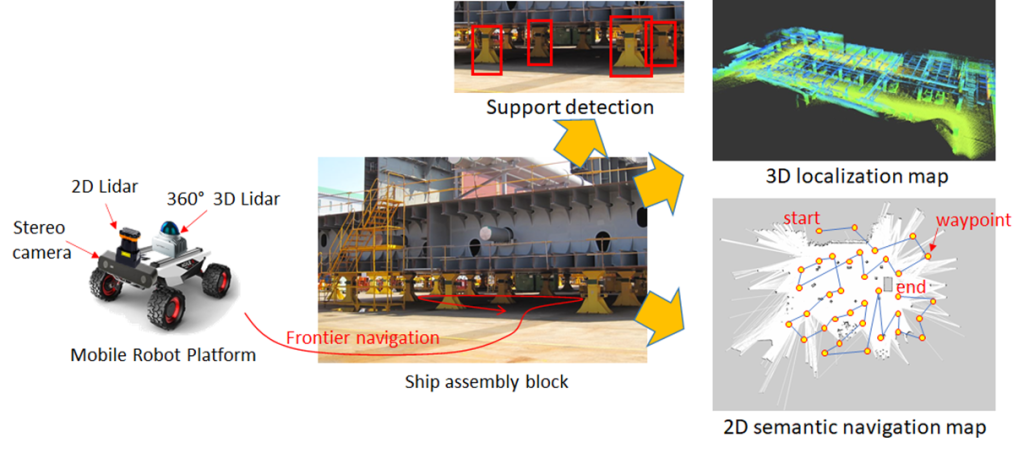
Big Block Navigation
조선소 대형 블록의 조립면을 3차원 계측하기 위하여 모바일 로봇에 고정밀 3차원 계측기를 장착하고, 로봇이 모든 계측 위치 (3차원 스캐닝 위치)로 자율 주행하는 기술을 연구한다. 이를 위하여 3가지 종류의 센서를 로봇에 장착하고 2차원 및 3차원 라이다 정보를 이용하여 로봇의 현재 위치를 추정하고, 카메라 영상 정보를 이용하여 주행공간의 장애물 인식하는 기술을 개발
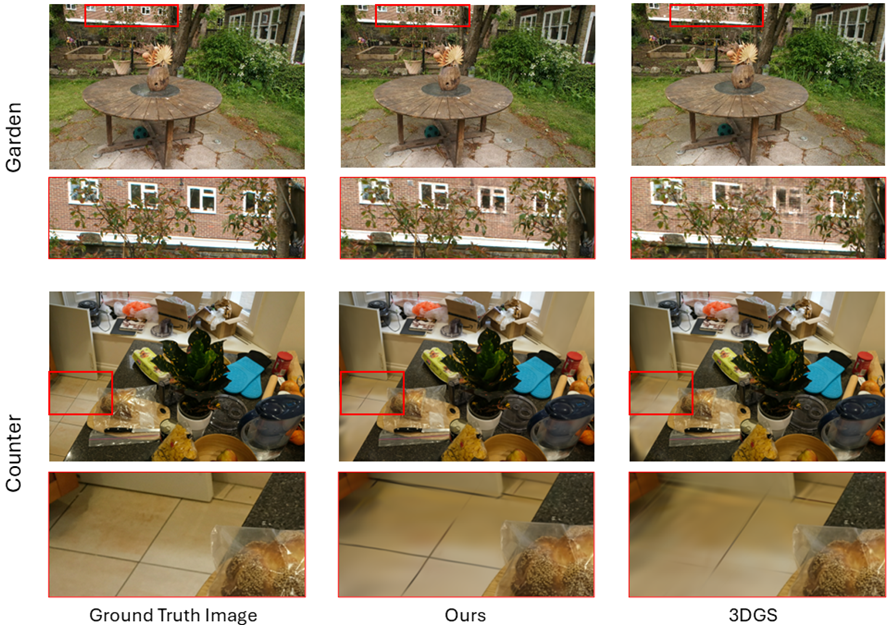
Gaussian Splatting
기존 메쉬 기반 CG 애셋 제작 환경에서 벗어나, 원하는 전/배경의 실사 촬영 기반으로 생성된 극사실적 뉴럴 애셋의 자유로운 인터랙티브 편집(이동․변형․삭제․조명) 및 영상 합성 기술과 기존 영상 제작 파이프라인 연계 플러그인 SW 개발을 통한 고품질 영상 콘텐츠 서비스 개발
- 인공 지능 기술을 이용하여 3D 공간을 표현(뉴럴 애셋)하고 임의 시점 영상을 생성하는 기술 개발
- Gaussian Splatting 의 아티팩터 제거 기술 연구
Demo
https://computer-robot-vision-lab.github.io/360-GS-Demo/360.html
다시점-다일시 위성영상을 이용한 도심지역의 3차원 모델 생성
위성 영상을 이용한 광범위 지역의 3차원 모델은 메타버스, 자율주행을 위한 HD맵, 군사 등 다양한 목적을 위해 생성된다. 기존에도 2차원의 영상으로 부터 카메라의 파라미터를 이용해 3차원의 모델을 생성하는 다양한 방법이 연구되었지만 위성영상의 경우 특수한 카메라 모델을 사용하기 때문에 앞서 연구된 방법을 적용하기 쉽지 않다. 따라서 본 연구에서는 위성영상에 사용되는 특수한 카메라 파라미터인 RPC파라미터를 추정하고 이로부터 고정밀-고밀도의 3차원 모델을 복원하는 것을 목표로 한다.
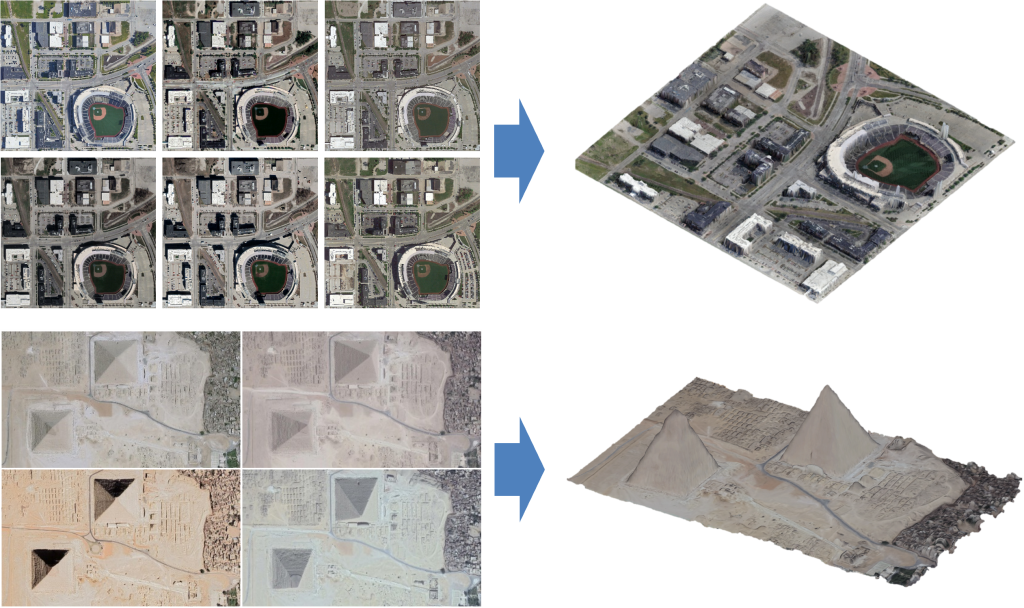
RPC estimation & DSM reconstruction
– 지리 참조된 pseudo DSM으로부터 RPC계산
– 계산된 RPC를 사용해 DSM 생성
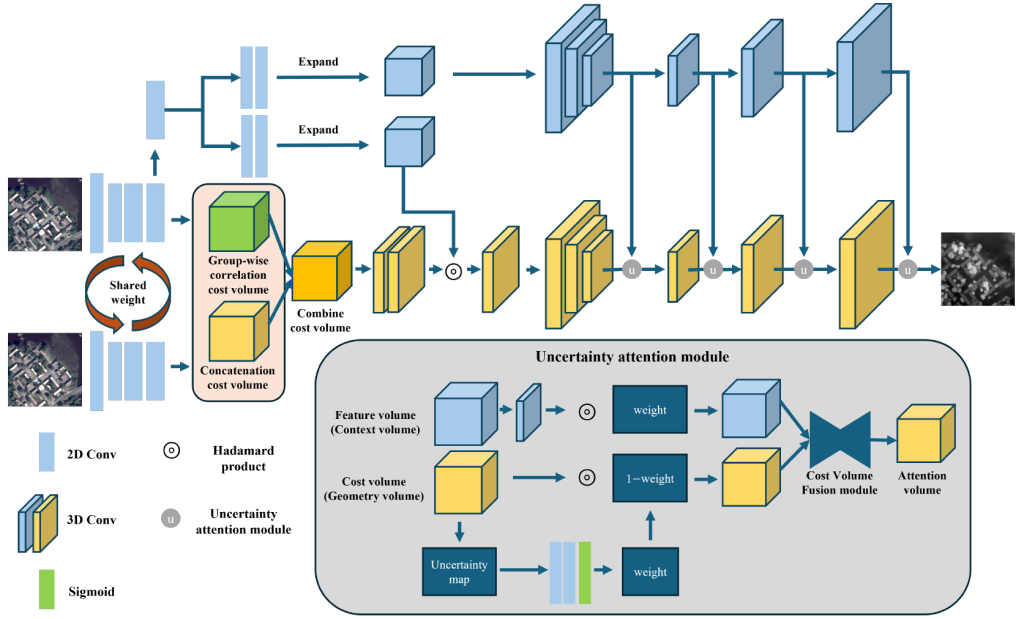
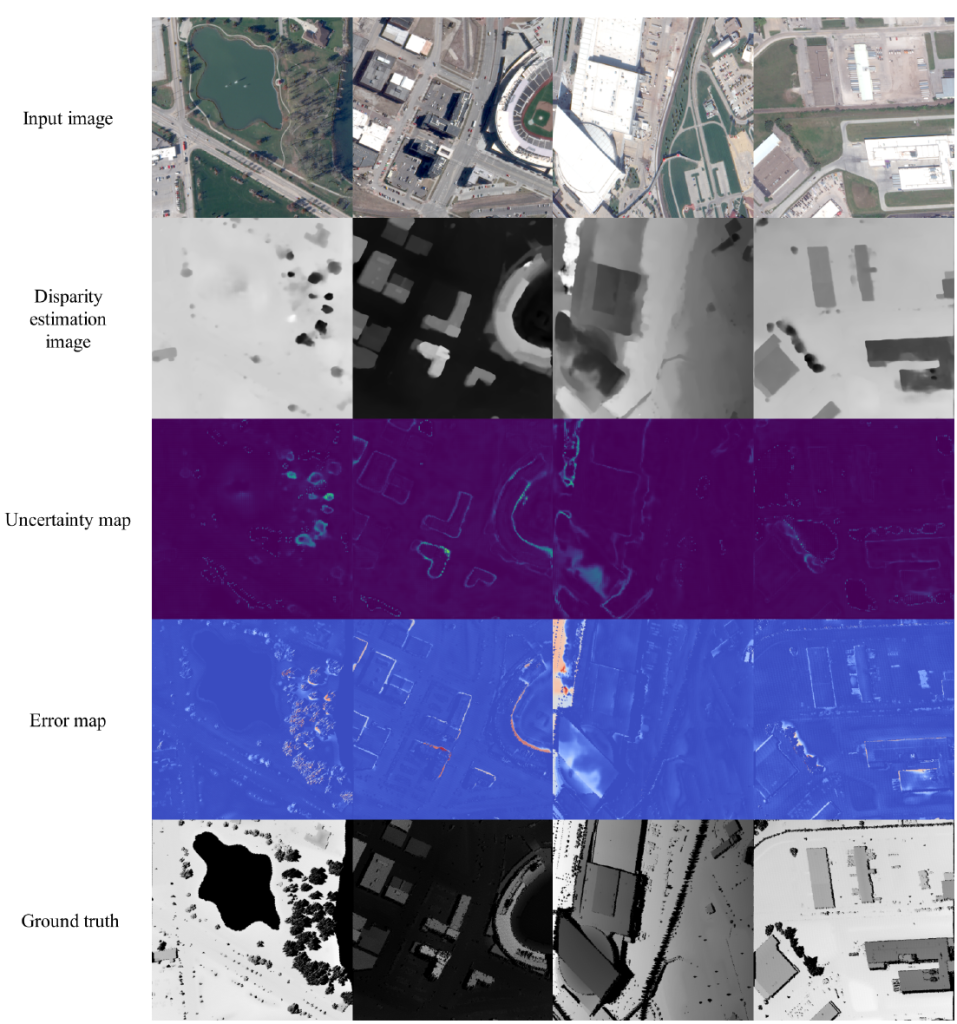
UGC-Net: 컨텍스트 기반 고해상도 스테레오 위성 영상 정합
본 연구는 고해상도 원격 탐사 스테레오 영상에서의 시차 추정을 위해 두 가지 딥러닝 네트워크인 CCA-Net과 UGC-Net을 제안하며, 이를 통해 맥락 정보가 시차 추정에서 얼마나 중요한 역할을 하는지를 강조한다. 두 네트워크는 서로 다른 메커니즘을 통해 시차 추정 과정에 맥락 단서를 통합하며, 기존의 계단식 다중 스케일 비용 볼륨 기반 접근법보다 우수한 성능을 달성하였다.
CCA-Net은 3D-CBAM과 Context Cross-Attention(CCA) 모듈을 결합하여, 맥락 정보를 비용 볼륨 내에 직접 통합함으로써 폐색이나 텍스처가 부족한 영역에서의 추정 성능을 향상시킨다. UGC-Net은 이를 확장하여, 기하학적 비용 볼륨에서 도출된 불확실성을 가중치로 활용하는 불확실성 기반 기하학–맥락 융합 전략을 제시한다. 이러한 접근은 복잡하고 비균질한 위성 장면에서도 안정적이고 신뢰도 높은 시차 추정을 가능하게 한다.
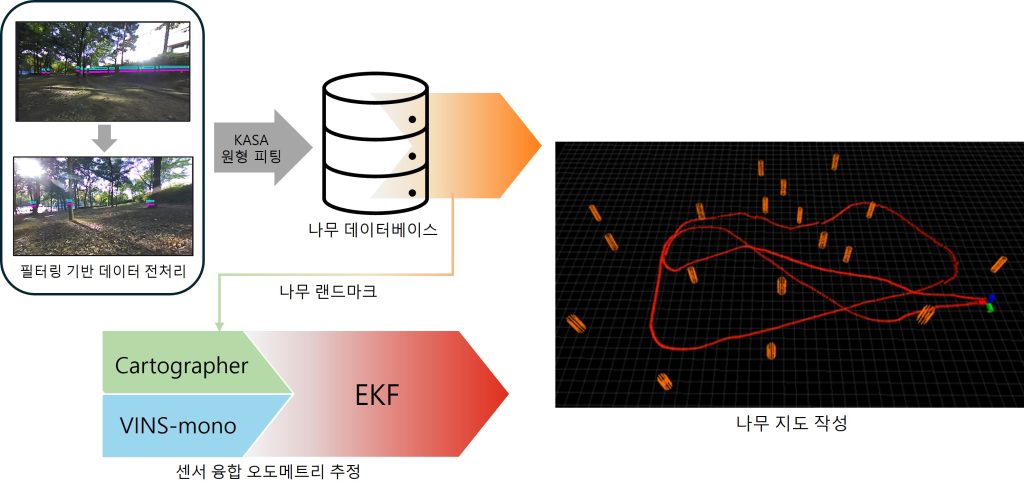
2차원 라이다와 스테레오 카메라 융합 기반 과수환경 3차원 맵 생성
기술의 발전과 함께 농촌지역에서도 농업용 로봇 또는 자동화 스마트팜 등을 다수 도입하여 생산성 강화를 하려는 사례가 증가하고 있다. 기존에도 다중 센서 기반 자기 위치 추정 및 정밀 지도 작성을 위한 방법이 많이 연구되었지만, 다수 연구들은 비용과 성능 간의 절충을 고려하지 않았다. 본 연구는 나무가 다수 식재된 과수환경이라는 특수한 환경에서 상대적으로 저렴한 비용으로 신뢰성 높은 나무만을 이용한 주변환경에 대한 지도 작성하는 알고리즘을 제안한다.
- 라이다 데이터의 필터 기반 전처리하여 나무 데이터 복원
- 카메라 라이다 캘리브레이션 수행한 후, 영상에 라이다 데이터 재투영
- 거리기반 필터링과 중간값 필터링으로 노이즈 제거 및 나무 기둥 데이터 취득
- KASA 원형 피팅으로 나무 기둥 복원
- 나무 랜드마크의 가중치 기반 데이터 관리 및 최적 위치 계산에 활용
- 나무 데이터베이스를 이용하여 가중치 기반 나무 데이터 관리
- 데이터베이스 내 나무 데이터와 유클리드 거리 기반 Segmentation한 군집데이터를 이용한 나무 랜드마크 생성
- 랜드마크 정보를 이용한 로봇 위치의 강건성 강화
- 라이다와 카메라로부터 오도메터리(Odometry) 획득 및 EKF 결합
- VINS-Mono와 Cartographer 알고리즘 활용
- EKF 확률 필터를 이용한 약결합 기반 로봇 위치 추정
- 나무 정보와 위치정보를 융합하여 나무 지도 작성