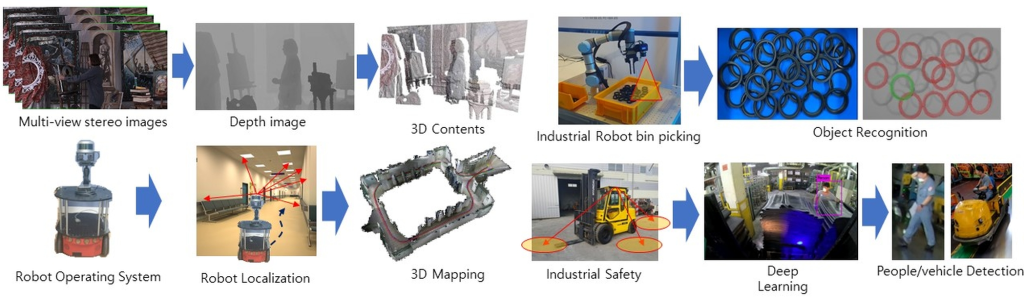
컴퓨터 및 로봇 비전 기술은 카메라로 획득한 영상정보로부터 대상체에 대한 2차원 또는 3차원 정보를 획득하여 산업 및 일상 생활에 유용한 기술 및 서비스를 제공하는 핵심 AI기술입니다. 특히 경북대학교 컴퓨터및로봇비전 (CRVL) 연구실은 3차원 비전기술에 기반한 공간 AI (Spatial AI)에 대한 연구 및 개발에 많은 관심을 가지고 있습니다. 3차원 컴퓨터 및 로봇비전 기술은 다음과 같은 응용분야가 있습니다.
- 무인로봇 및 무인자동차의 자율주행을 위한 위치 인식
- 스마트 자동차를 위한 도로물체 인식, 주행가능영역 분류
- 로봇 스스로 작업 공간으로 이동하기위한 경로생성 및 자율주행
- 3D 공간 인식을 위한 물체의 3차원 형상 정보 복원
- 다시점 스테레오 기술을 이용한 3D 공간 콘텐츠 생성
- 드론, 위성영상의 지형물 3차원 복원
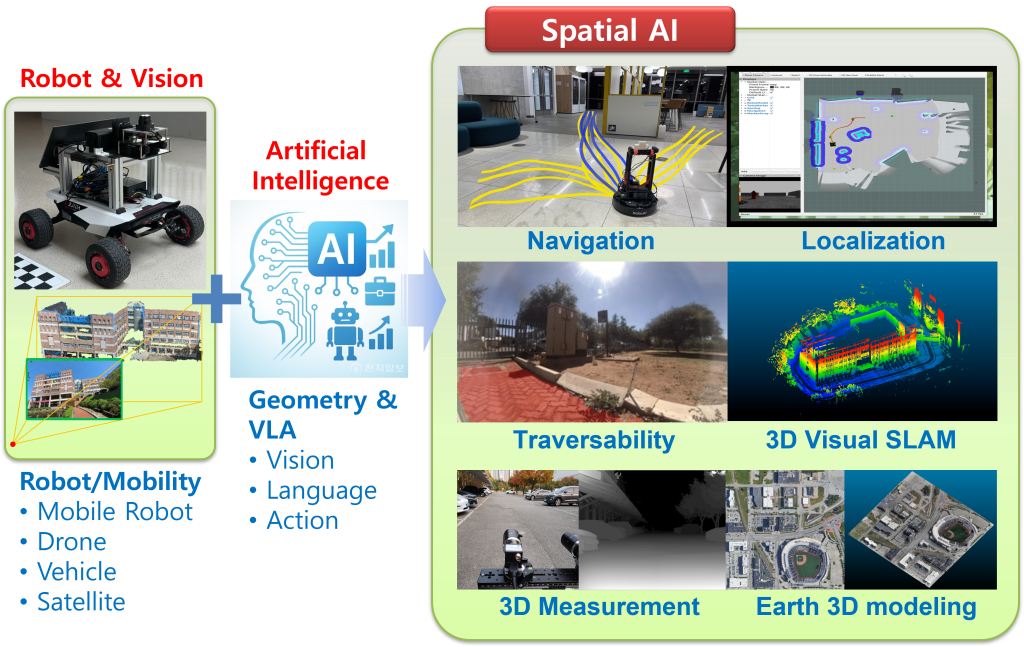
- 3D Spatial(공간) Data Acquisition (3D Scanning): 로봇에 비전 카메라, IMU, GPS 등 다양한 센서를 설치하고 보정하여 로봇의 AI를 학습하고 자율주행하기 위한 3차원 공간 정보를 획득하는 기술을 개발

- 3D Spatial AI: 로봇, 카메라로 획득한 영상 정보에서 주행가능 공간의 인식, 물체의 3차원 위치인식, 3차원 거리 측정 등 로봇이나 자동차의 자율주행, 주행환경 인식, 물체까지의 거리인식, 로봇의 위치인식, 3차원 공간 모델링을 위한 공간 (Spatial) AI기술의 개발

- Robot and Mobility Applications: 3차원 공간 AI 기술을 로봇, 모빌리티의 다양한 산업 분야에 적용하는 기술
- Robot navigation
- Robot picking
- Vision-Language-Action (VLA)
- 3D localization and mapping (SLAM)
- Multi-view 3D contents synthesis