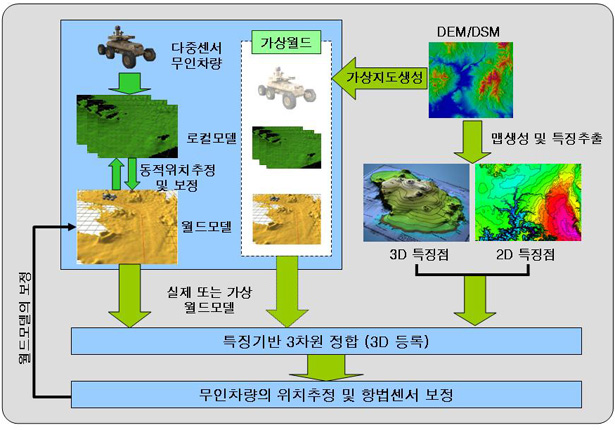
| 3차원 비전 기술을 이용한 무인이동로봇의 위치인식(Localization)기술을 연구하고 있습니다. 로봇이 스스로 주행하기 위해서는 자신의 위치를 정확히 추정할 필요가 있습니다. 본 연구에서는 360도 레이저 거리정보와 3차원 지형정보 (DSM)을 등록하여 로봇의 위치를 추정합니다. 로봇의 주행 속도를 높이기 위하여 3차원 위치추정을 실시간으로 구현하고 있습니다. | |
 |
|
무인이동로봇의 3차원 위치 추정
School of Electronics Engineering, Kyungpook National University, South Korea
| 3차원 비전 기술을 이용한 무인이동로봇의 위치인식(Localization)기술을 연구하고 있습니다. 로봇이 스스로 주행하기 위해서는 자신의 위치를 정확히 추정할 필요가 있습니다. 본 연구에서는 360도 레이저 거리정보와 3차원 지형정보 (DSM)을 등록하여 로봇의 위치를 추정합니다. 로봇의 주행 속도를 높이기 위하여 3차원 위치추정을 실시간으로 구현하고 있습니다. | |
|
|