스테레오 비전 분야에서 특징 기반 스테레오 정합 방법은 빠른 수행 시간과 높은 정확성을 갖습니다.
|
|
|
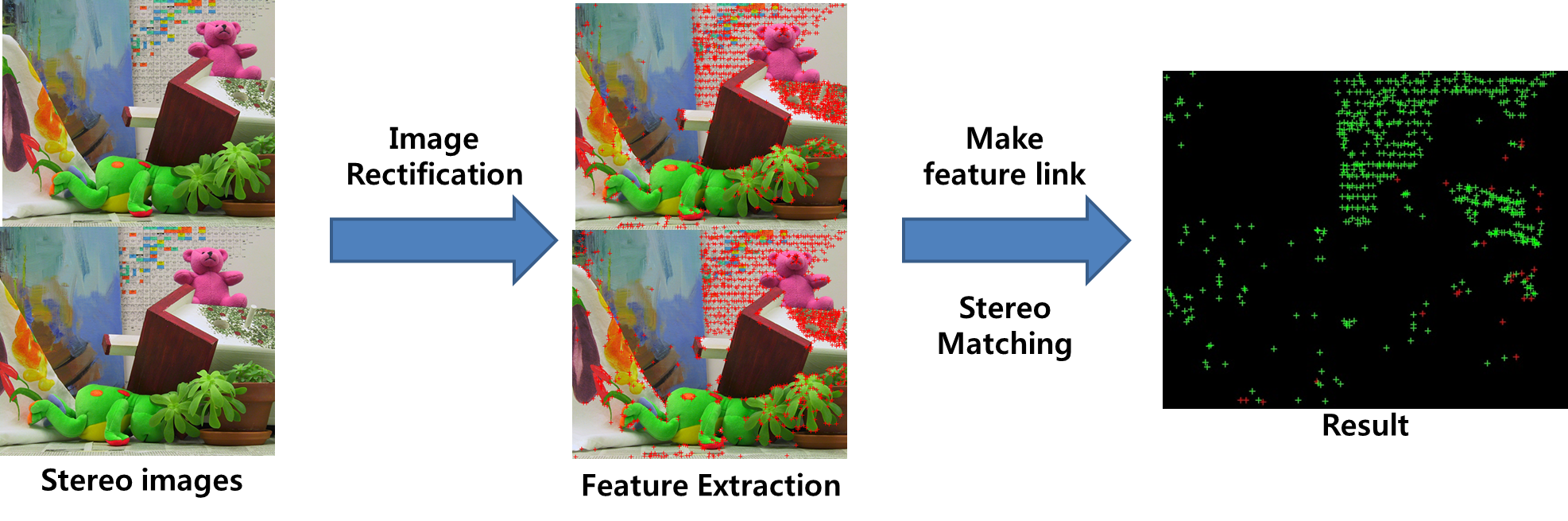
In stereo vision researches, feature-based stereo matching algorithms have been widely used in the preference of low computation cost and high matching accuracy. This paper presents a new stereo matching algorithm based on feature links. The proposed method, which is called feature link matching, utilizes the length and color information of feature links in stereo images. The proposed algorithm is very effective to decide correct correspondence, thus increases accuracy of stereo matching. In addition, inner features which lie within a link are interpolated by an internal division method to increase the number of correct disparity values. For real-time applications of the proposed method, point features are determined by the FAST extractor. Three feature link constraints, epipolar, ordering, and length, are employed. In experimental results, feature link matching yields 1 pixel disparity accuracy of 98.6% which is the average of 5 sample images from the Middlebury stereo data. Average computation time is about 18.7ms.
|
|
|
 |
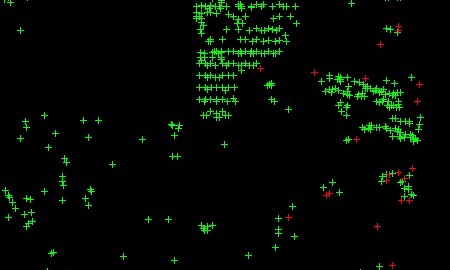
Distance between adjacent other features. Stereo matching at same distance
- Accuracy at Feature Points
|
 |
download