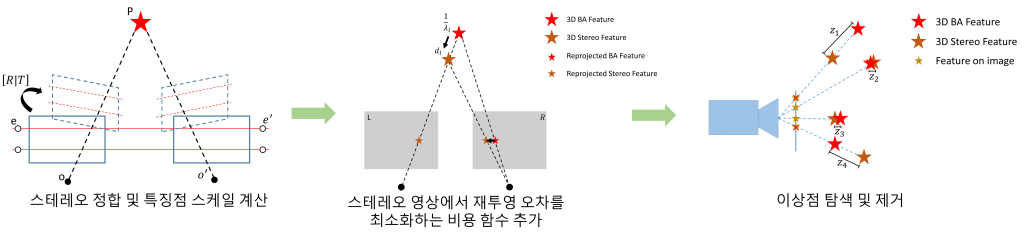
- 템플릿 기반의 스테레오 정합 및 각 특징점 스케일 계산
– 스테레오 카메라 캘리브레이션을 수행하고 해당 정보를 바탕으로 두 영상을 렉티피케이션(rectification)한다.
– 왼쪽 영상의 특징점을 기준으로 템플릿을 생성하고 생성된 템플릿을 오른쪽 영상에서 탐색
– 템플릿 정합을 통해 획득한 대응점 정보를 활용하여 특징점의 스케일 정보 계산
- 상태 벡터 추정을 위한 비선형 최적화 단계에서 스테레오 정합으로 획득한 특징점의 스케일 정보 활용
– 기존 VINS-Mono에서 비선형 최적화를 위해 사용하는 비용 함수에 새로운 텀을 추가한다.
– 추가된 새로운 텀은 상태 벡터 최적화 시 3차원 특징점의 위치를 스테레오 정합으로 획득한 특징점의 위치에 수렴하도록 유도하는 함수이다.
– Ceres solver를 이용하여 비선형 최적화를 수행한다.
- 최적화된 특징점의 스케일 정보와 스테레오 정합으로 획득한 스케일 정보 간에 차이가 크면 이상점으로 분류
– 최적화 단계를 수행한 후 결과를 바탕으로 이상점 탐색을 수행한다.
– 최적화된 특징점의 스케일 정보와 스테레오 정합으로 획득한 스케일 정보의 차에 대한 가우시안 분포를 계산한다.
– 가우시안 분포 상에서 확률이 낮은 영역에 속하는 특징점은 이상점으로 분류하고 슬라이딩 윈도 상에서 제거한다.
영상 1. IT 2호관 실험
영상 2. 연구실 내부 실험