진행과제 (1)
- 과제명: AI 기반의 양팔로봇 탑재형 자율주행 AMR 개발
- 연구기간: ~ 2027.3.31
- 주관기관: (주)에스엘
- 연구내용
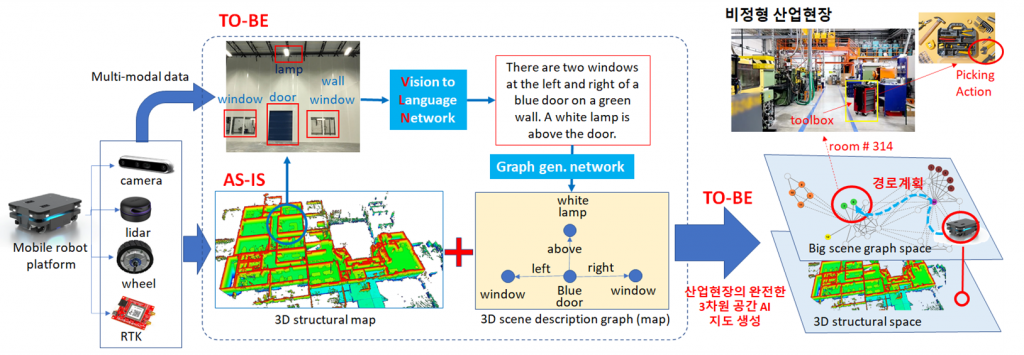
- 제조공장 실내공간의 자율주행
- 실내 공간의 딥러닝 물체 인지 및 인지 결과를 이용한 로봇 위치 결정결정하고 CAD 모델을 합성
- 지도가 없는 실내환경에서의 이동 목표 지점으로의 완전 자율 주행
- 로봇비전 기술 및 딥러닝으로 풀어야할 문제
- 다양한 제조공장 실내 물체의 인지
- 물체 인지결과 및 센서정보를 이용한 맵이 없는 환경의 자율주행
진행과제 (2)
- 과제명: 블록 하부계측 로봇의 자율주행 알고리즘 개발
- 연구기간: ~ 2026.10.31
- 지원기관: (주) 삼성중공업
- 연구내용:
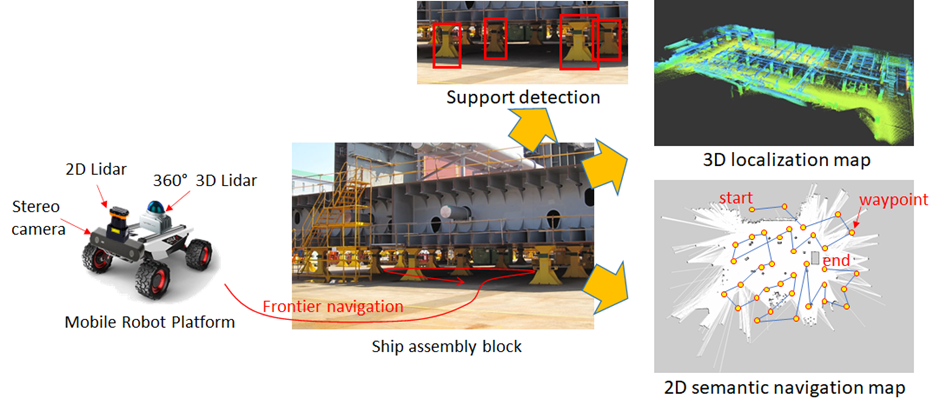
- 조선소 대형 블록 하부 공간의 로봇 자율 주행
- 주행맵이 없는 환경에서의 100개 이상의 목표지점 순차 이동
- 3차원 라이다, 비전센서 기반의 정밀 로봇 위치 추정
- ROS 기반의 자율주행 시뮬레이션
진행과제 (3)
- 과제명: AI 기술을 활용한 캐비테이션 거동특성 및 변동압력 예측 기법 개발
- 연구기간: ~ 2026.10.31
- 지원기관: (주) 삼성중공업
- 연구내용
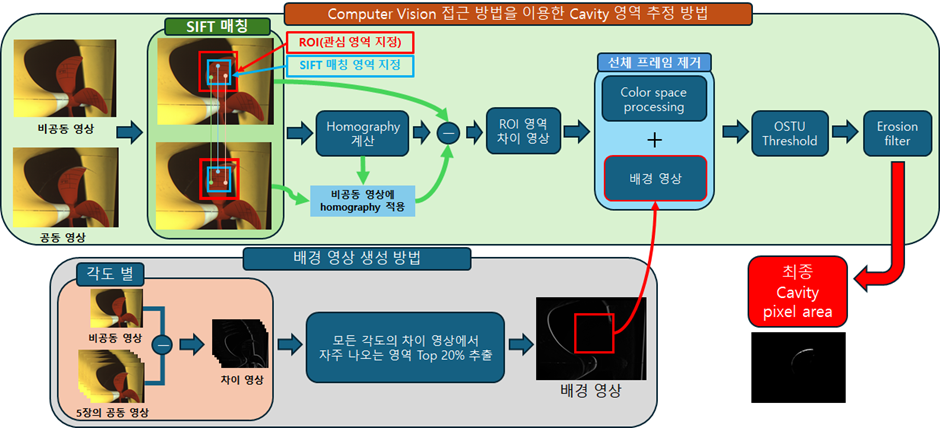
- 대형선박 프로펠러에 발생하는 캐비테이션의 AI 분석
- 캐비테이션의 3차원 볼륨 추정
- 캐비테이션의 3차원 볼륨에서 프로펠러에 가해지는 압력 분포 분석 등
진행과제 (4)
- 과제명: 뉴럴 애셋 기반의 영상 제작 파이프라인 연계를 위한 영상합성 및 편집 기술 개발
- 연구기간: ~ 2026.12.31
- 지원기관: 한국전자통신연구원
- 연구내용
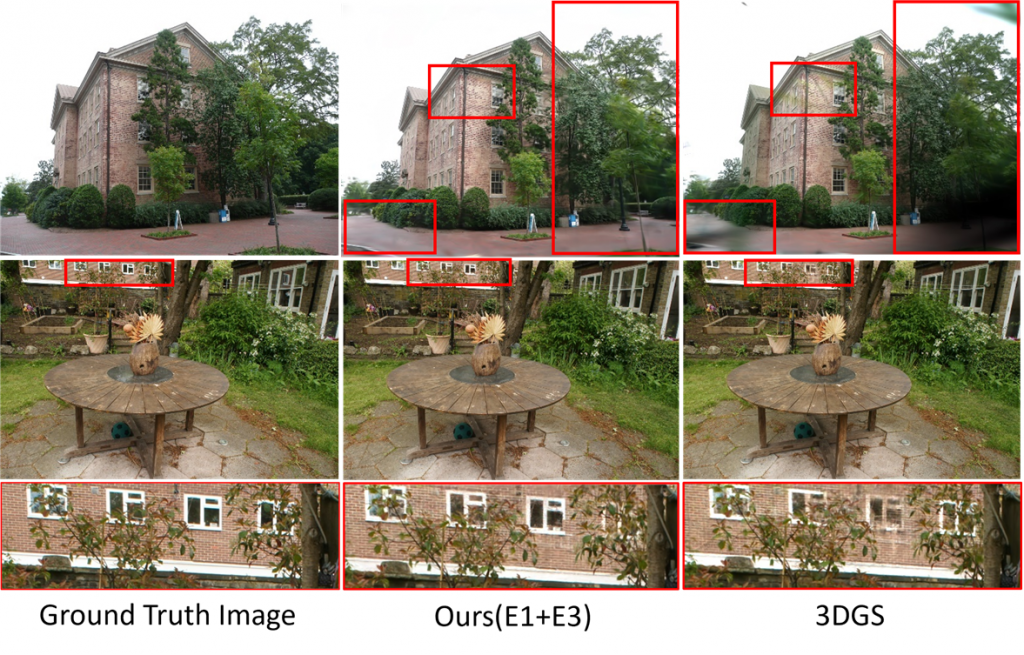
- Gaussian Splatting 기반의 다시점 스테레오 비전 기술 개발
- Gaussian Splatting에서 발생하는 아티팩트의 제거 AI 기술 개발
- 다시점 스테레오 영상으로부터 새로운 시점의 영상 생성
- 영화, XR, AR 등 미래 메타버스 등에 활용
진행 과제 (5)
- 과제명: 다중지능기반 휴먼-센트릭 자율주행 핵심기술 개발
- 연구기간: 2021.6.1 ~ 2030.5.31
- 지원기간: 한국연구재단 대학중점연구소 (ICT자동차융합연구센터)
- 연구내용:
- 차량에 장착된 MMS(Mobile Mapping System)을 이용한 자율주행자동차의 도심 주행을 위한 3차원 지도 생성
- 카메라-IMU-Lidar 센서 융합을 이용한 SLAM 기술 구현
- 연구에서 풀어야 할 문제
- 카메라-IMU의 정밀한 보정 및 인공지능 학습 데이터 구축
- 카메라-IMU를 이용한 자율자동차의 위치 인식

진행 과제 (종료)
- 과제명: 실 공간 대상 XR 생성 및 변형/증강 기술 개발
- 연구기간: 2021.4.1 ~ 2024.12.31
- 지원기관: 한국전자통신연구원
- 연구내용
- 우리 주변의 실내 물체의 3차원 자세 (회전, 이동) 을 딥러닝으로 추정
- 물체의 영상을 학습하여 물체의 3차원 자세를 결정하고 CAD 모델을 합성
- 실제 공간의 모습을 가상의 공간에서 CAD 모델로 복원
- XR, MR 등 미래 메타버스 등에 활용

- 딥러닝으로 풀어야 할 문제
- 사진에 찍힌 실물체의 3차원 자세 (회전, 이동)는 무엇인가?
- 실제 물체의 영상과 가장 유사한 CAD 모델은 무엇인가?
- 실제 사진과 그래픽 CAD 모델의 유사도 차이를 극복하는 딥러닝 모델 개발이 필요

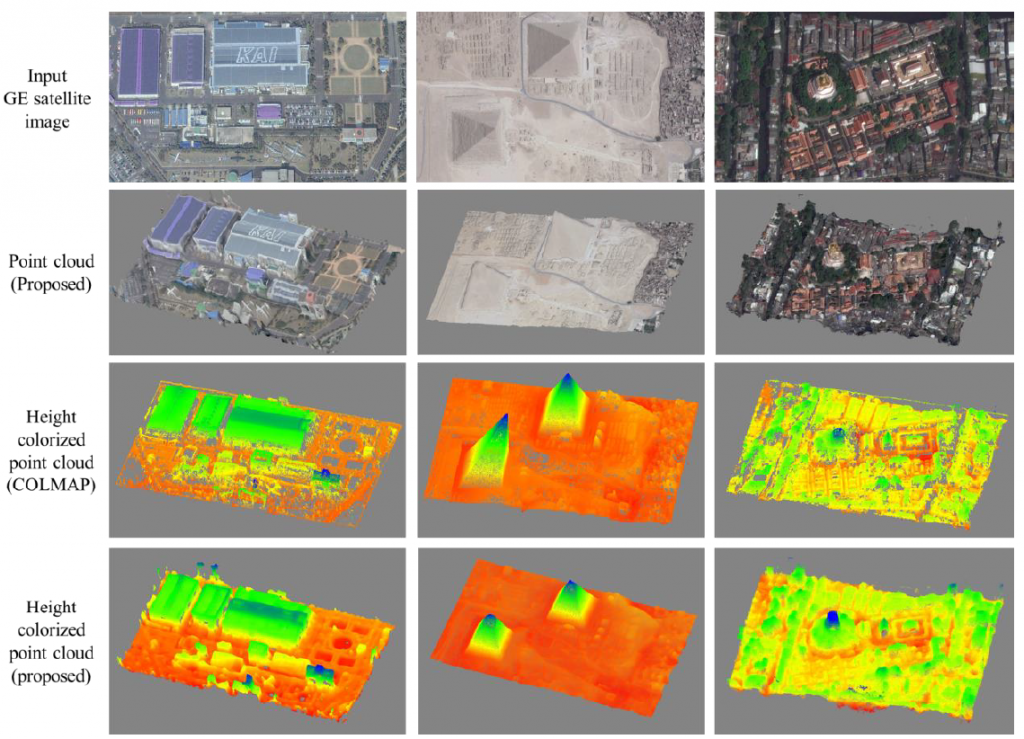
진행 과제 (종료)
- 과제명: 다시점-다일시 위성영상을 이용한 대도시권의 고정밀-고밀도 3차원 DSM 생성 기술 개발
- 연구기간: 2021.3.1 ~ 2024.2.29
- 지원기관: 한국연구재단 중견연구
- 연구내용
- 도심지역의 다시점-다일시 위성영상을 이용하여 건물과 지형의 3차원 높이값 복원
- 다양한 시점의 위성영상을 이용하여 빌딩, 도로, 교량 등의 건축물의 3차원 형상을 획득
- 연구에서 풀어야 할 문제
- 누구나 사용할 수 있는 Google Earth 를 이용하여 지구 표면의 3차원 정보를 획득할 수 있는가?
- 딥러닝으로 건축물의 높이를 추정할 수 있는가?
- 다시점 스테레오 기술 (Multi-view Stereo)을 위성영상에 적용하는 방법의 연구
진행 과제 ( 종료)
- 과제명: 환경인지기반 자율주행 기능을 가진 전방향 주행 방식 고하중 팔레트 로봇 개발
- 연구기간: 2021.7.1 ~ 2022.12.31
- 지원기간: 과기정보통신부
- 연구내용:
- 소형 고하중 팔레트 로봇의 개발
- 높이가 낮은 팔레트 로봇의 Visual SLAM 기술 개발
- 다시점 어안렌즈를 이용한 Visual SLAM 기술 개발
- 연구에서 풀어야 할 문제
- 어안 카메라를 이용하여 로봇의 이동을 측정하는 방법의 연구
- 어안 카메라와 로봇의 2D Lidar 를 결합하여 팔레트로봇의 자율 주행 연구

종료과제
| 순번 | 과제명 | 지원 기관 |
| 1 | 정밀 자동 병소 추적 방사선 암치료 시스템 기술 개발 | 한국원자력연구원 |
| 2 | 구조광 기반의 3D 영상 센서 모듈 및 응용 시스템 개발 | (주)코어벨 (한국산업기술평가관리원) |
| 3 | 2K-1K급 주-부 카메라간 영상 일치 기술연구 | 한국전자통신연구원 |
| 4 | 다시점 3D 깊이 데이터 정렬 및 정합에 관한 연구 | 한국전자통신연구원 |
| 5 | 메시 생성을 위한 3D Point Cloud 정합 시제품 | (주) 넥스트비쥬얼스튜디오 (한국전자통신연구원) |
| 6 | 배관 내부 결함 비파괴 진단 기술 개발 | 한국원자력연구원 |
| 7 | 마이크로디스플레이를 이용한 초소형 구강용 3차원 스캐닝 기술 개발 | 한국학술진흥재단 |
| 8 | 실사/CG 합성을 위한 실시간 3차원 안정화 및 거리영상 복원 기술 개발 | (주) AR Vision (국방과학연구소) |
| 9 | 다시점 및 Wide-baseline 거리영상의 온라인 정합기술 개발 | 한국학술진흥재단 |
| 10 | 위성영상을 이용한 3차원 모델 제작 및 지형 정합 기술 개발 | (주) AR Vision |
| 11 | 다시점 3차원 거리영상의 온라인 정합 기술 개발 | 한국학술진흥재단 |
| 12 | 실사/CG 합성을 위한 실시간 윤곽선 보정 및 거리 키잉 기술 개발 | (주) AR Vision (국방과학연구소) |
| 13 | 움직이는 물체 삭제 및 배경합성 기술 개발 | 한국전자통신연구원 |
| 14 | 영상기반 DFD 보정을 이용한 3차원 물체추적 | 경북대학교 |
| 15 | 기하학적 영상 왜곡 보정을 위한 카메라 자세 추정 알고리즘 연구 | (주) 3B systems |
| 16 | 이동 플랫폼에서 다중센서 영상을 이용한 3D 등록/오차보정 알고리즘 개발 | ADD (국방과학연구소) |
| 17 | 다시점 영상카메라 기반의 3차원 맵 생성 및 위치정보 획득 기술 | 한국연구재단 |
| 18 | 3D융합 라스트제작을 이용한 맞춤형 신발 소셜커머스 서비스 개발 | 중소기업청 |
| 19 | 마커기반 X선 헤드 및 검사 목표점의 3차원 위치 측정 기술 개발 | 한국연구재단 |
| 20 | 초실감 서비스를 위한 동적 객체의 실시간 4D복원 기술 개발 | 기가코리아사업단 |
| 21 | 전방위 다시점 LF영상 기반 3차원 깊이 정보 추출 및 결합 기법 연구 | 전자통신연구원 |
| 22 | 붕괴지역 매몰자 탐지구조를 위한 협소 공간 탐색 로봇기술 개발 | 한국로봇융합연구원 |
| 23 | 센서융합기반 실내 3차원 위치추정 및 형상화 알고리즘 개발 | 한국연구재단 |
| 24 | 3D족형 스캐닝 및 AR기술을 활용한 맞춤형 신발 디자인 제작 서비스 플랫폼 개발 | 한국산업기술평가관리원 |
| 25 | 환경인지기반 자율주행 기능을 가진 전방향 주행 방식 고하중 팔레트 로봇 개발 | 경북대학교 |