Abstract
일반적인 자율 주행 자동차의 연구 방식으로는 차량 에 설치한 다양한 센서로부터 입력받은 데이터를 이용 하여 주행 차량 주변 환경을 인식하고 판단하며 제어 하는 방식을 이용한다. 하지만 이러한 방법으로는 주행 차량의 조명 환경이나 기상 환경에 따라 잘못된 데이터를 입력 받을 수 있으며 이는 자율 주행에 있어 치명적인 요소로 작용한다. 따라서 최근 자율 주행 자 동차의 최근 연구 동향으로는 라이다 센서와 카메라 센서를 이용하여 3차원 지도를 생성하여 차량이 자율 적으로 주행할 수 있는 운행 설계 영역(Operational Design Domain)을 구축하는 방향으로 연구가 진행되 고 있다. 본 연구는 ODD 구축을 위해 특정 지역에 대한 2차원 도로맵 생성 방법과 카메라와 라이다 센서를 이 용한 3차원 지도 생성 방법을 소개한다.
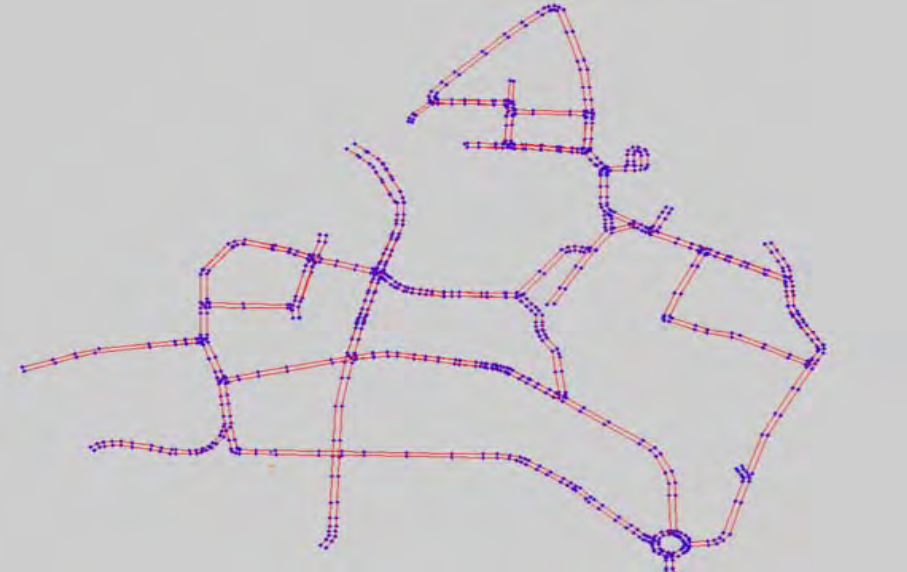 그림 1 2차원 도로맵 생성과 GPS 좌표 보정
그림 1 2차원 도로맵 생성과 GPS 좌표 보정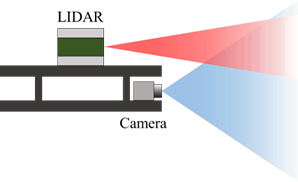 그림 2 Velodyne 센서와 다시점 카메라의 시점 보정
그림 2 Velodyne 센서와 다시점 카메라의 시점 보정차량 주행 데이터 획득 장치 제작
– 3D 맵 생성을 위해 ADAS 맵에 대한 실외 3차원 데이터 획득 필요
– 앞서 제작한 전방향 영상 및 3차원 데이터 획득 장치를 차량에 설치할 수 있는 리그 제작
– 데이터 획득 장치를 차량에 설치하여 ADAS 맵 경로를 따라 주행하며 실외 3차원 데이터 획득
 그림 3 차량 설치 장치 제작
그림 3 차량 설치 장치 제작 그림 4 데이터 획득 장치설치
그림 4 데이터 획득 장치설치ADAS 맵에 대한 3D 맵 생성
– 차량의 주행 경로에 대한 GPS 위경도 좌표와 해당 위치의 동기화된 2차원 영상 데이터와 3차원 데이터 획득
– 두 센서간의 정밀보정을 이용하여 컬러 포인트 클라우드 데이터 획득
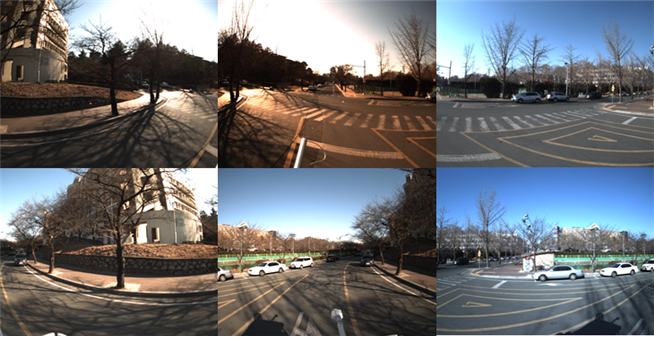 그림 5 차량 주행중 획득한 2차원 영상 데이터
그림 5 차량 주행중 획득한 2차원 영상 데이터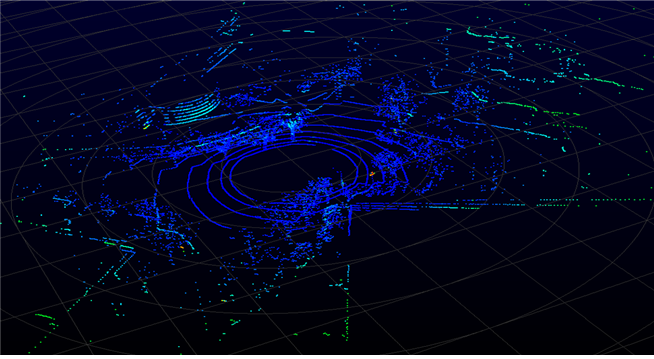 그림 6 차량 주행중 획득한 3차원 영상 데이터
그림 6 차량 주행중 획득한 3차원 영상 데이터