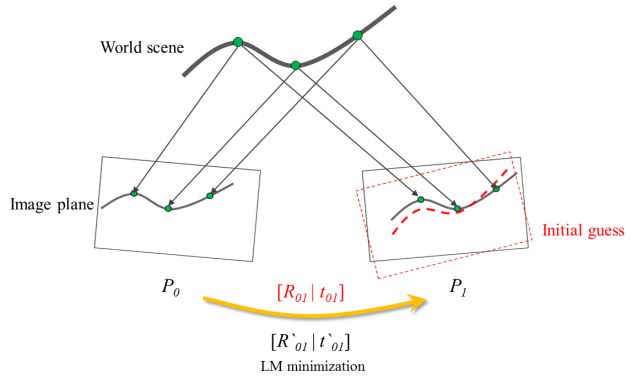
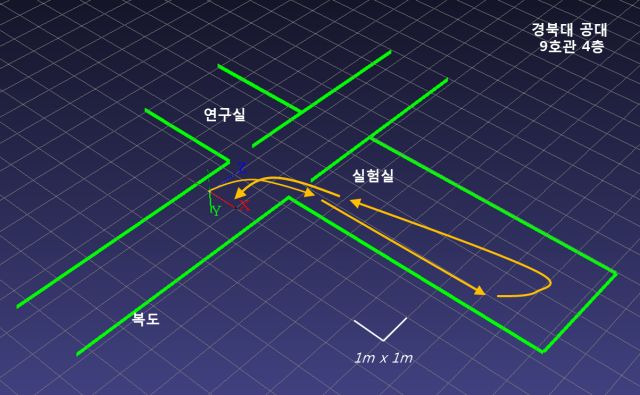
스테레오 비전 센서를 이용한 3차원 지도 생성 전체 진행 과정 RANSAC 기반 3차원 모션 추청 Lebenverg-marquardt 알고리즘을 이용한 re-projection 오류 최소화 로봇 플랫폼 실험: 실내 주행 복귀 – Demo Video: download (WMV, 21.4MB) 전체 진행 과정 RANSAC 기반 3차원 모션 추청 Lebenverg-marquardt 알고리즘을 이용한 re-projection 오류 최소화 로봇 플랫폼 실험: 실내 주행 복귀 – Demo Video: download (WMV, 21.4MB)