|
|
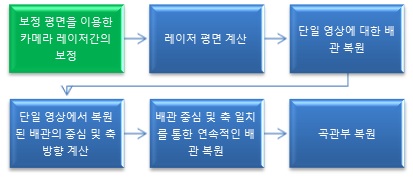
그림 1. 배관 복원 순서 |
0. 다중레이저와 카메라를 이용한 배관검사장치
| 배관검사장치는 배관결함검사로봇(상)의 일부로 진행방향을 기준으로 가장 앞쪽에 위치한다. 100mm 배관을 목표로 하기 때문에 실제 배관 검사에 사용되는 모듈(좌하)은 직경이 100mm이고 실험용으로 사용하는 경우(중하,우하)는 70mm 정도이다. 두 가지 모듈에서 동일하게 4개의 선형레이저와 레이저의 방향을 바꿔주는 반사경, 중심에 고해상도 흑백 아날로그 카메라로 구성되어있다. 렌즈는 영상획득 시 화각을 고려하여 3.5mm 광각 렌즈를 사용하였다.
|

그림 2. 배관 검사 로봇과 결함 검사 모듈 |
1. 카메라와 레이저간의 보정
| 카메라와 레이저의 보정은 반복적인 과정을 통해서 이뤄진다. 최초 보정평면을 이용한 보정과정에서 레이저 평면이 결정이 되면 평면과 단일 영상을 이용하여 배관 모델을 복원한 후 배관의 축을 계산한다. 배관의 축을 중심으로 하여 이미 알려진 배관의 직경에 맞는 가상의 배관을 생성한다. 영상의 레이저의 ray가 가상 배관과 만나는 점을 계산하고 이 점들을 이용하여 새로운 레이저 평면들을 계산한다. 이전 평면과 새롭게 구해진 평면간의 차가 일정 수준 이하가 될 때까지 계산을 반복한다.
|

그림 3. 카메라와 레이저간의 반복적 보정 모듈 |
2. 단일 영상에 대한 배관 복원
| 선형레이저와 카메라간의 보정 과정을 통해서 레이저 평면의 방정식과 카메라의 내부 변수들을 획득한 후, 우리는 이들 정보를 이용하여 카메라좌표계에서 레이저가 물체에 반사되는 점들의 위치를 3차원으로 계산할 수 있다. 다중 레이저를 이용하여 폐곡선을 생성하는 경우에는 한 장의 영상으로부터 배관 내부의 일부분을 복원할 수 있다. |
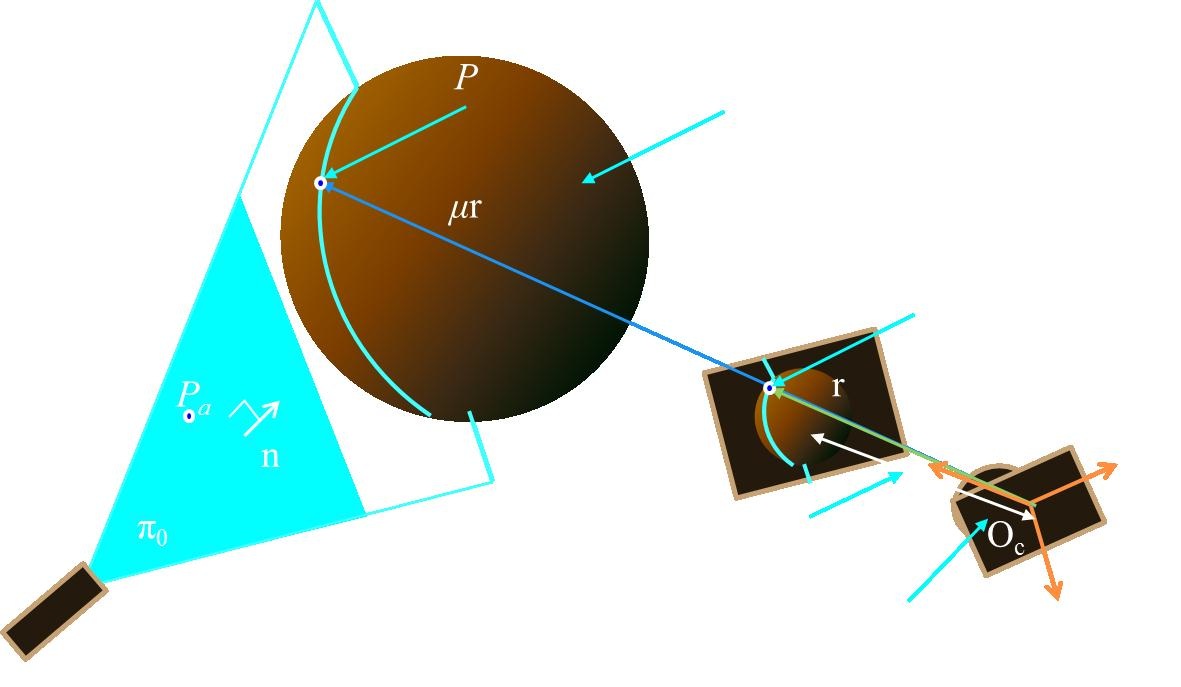
그림 4. 레이저평면과 카메라영상을 이용한 물체 복원 |
3. 축 중심 및 방향의 일치화를 통한 연속 영상에 대한 직선 배관 복원
| 단일 영상을 이용하여 계산된 배관 모델들을 이용하여 배관 전체를 복원할 수 있다. 하지만 각각의 단일 영상으로부터 복원된 모델은 카메라좌표계상에세 복원되었기 때문에 전체적인 배관의 형상을 만들기 위해서는 공간좌표계로 바꾸어주는 과정이 필요하다. 직선 배관의 경우에는 축 중심과 축 방향의 일치화를 통해서 연속적인 복원 모델 생성이 가능한다. 검사 모듈이 일정 속도로 이동함을 가정하여 축 방향을 따라 일정한 간격으로 단일배관 모델을 나열한다. |
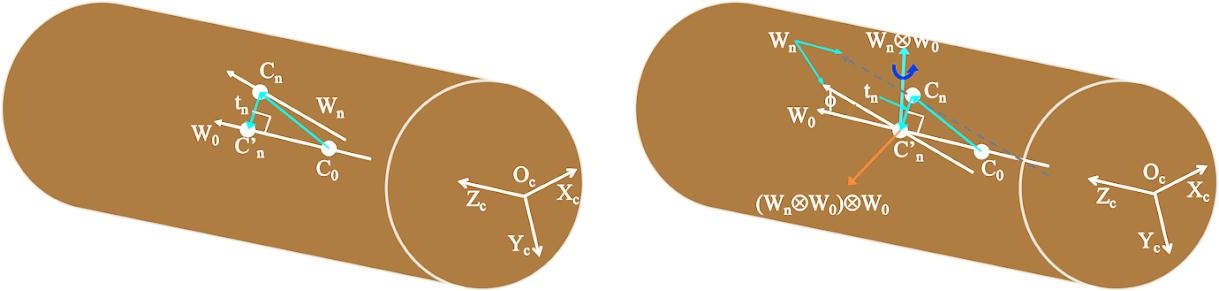
그림 5. 축 중심 일치화(좌) 및 축 방향 일치화(우) |
4. Torus 접합을 통한 연속 영상에 대한 곡선 배관 복원
| 직선 배관부와 달리 곡선 배관부는 실린더 모델을 가정하여 단일 영상에서 복원된 모델에 대해서 축 중심, 방향 을 계산할 수가 없다. 대신에 곡선 배관부는 torus의 일부로 가정할 수 있다. Torus의 일부로 가정하는 경우 정확하게 torus에 접하도록 위치하여야 하는데 이는 ICP 방법을 이용하였다. 최초 일부분만 생성된 torus의 무게 중심에 단일 영상에서 복원된 곡선 배관 모델의 무게중심을 이동 시키고 ICP를 이용하면 적은 이동 및 회전 변환을 통해서 곡관부에 접한다. 곡선 배관에서 검사 모듈이 일정한 각속도로 이동함을 이용하여 단일배관 모델을 배열한다. |
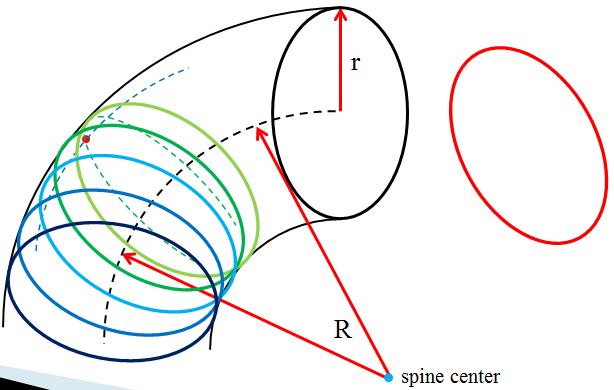
그림 6. 연속적인 곡관부 복원 모델의 torus 일부로 접합 |
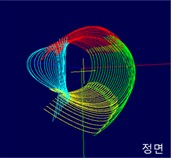
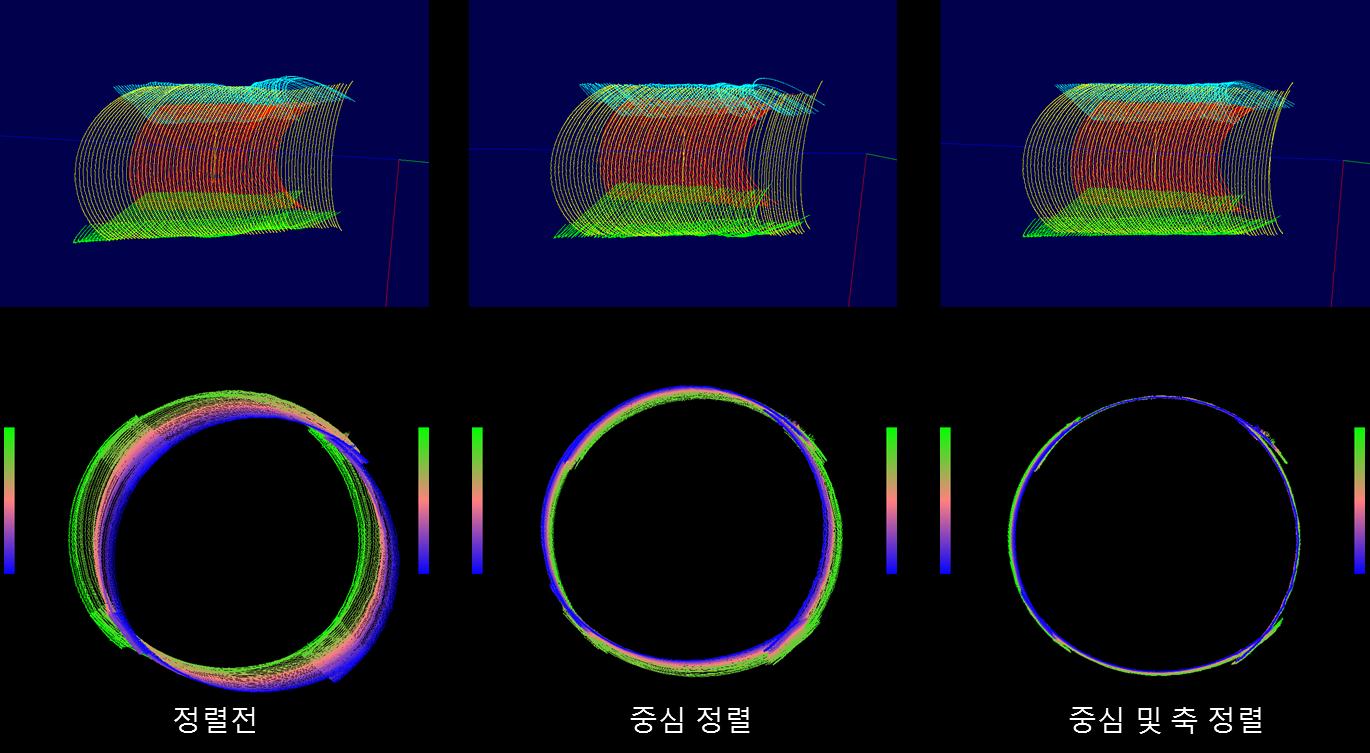
5. 결과 (1)직선 배관 정렬 결과
| 직선 배관에서 70장의 영상을 손으로 이동하는 실험의 경우 배관 축의 정렬이 이뤄지지 않은 경우에는 복원 모델이 직선 배관과는 거리가 멀다. 하지만, 중심 정렬 및 축 방향 정렬이 이뤄지면서 직선 배관의 형태를 띈다. 또한 투영한 결과에 서 보듯이 배관 축방향에 따른 오차가 줄어든다는 것을 알 수 있다. |
 |
(2) 곡관부 정렬 결과
| 곡선 배관에서 손으로 이동하여 30장의 영상을 획득하였다. 직선 배관 복원 방식으로 축 중심 및 방향을 일치 시키는 방법을 이용하면 곡선 배관의 쏠림 현상으로 인해 결함 검출이 힘든 상태이다. 하지만, 곡선 배관 복원 방법을 이용하면, 결함 검출이 용이한 형태로 복원이 된다. |
 |