- 이동로봇 및 비전-라이다 센서기반의 지도 작성
– 전방위 라이다(LIDAR) 정보 및 영상 획득 융합 장치 제작
– 실험용 이동 로봇 구성
– 로봇 제어 및 센서 제어 개발 도구 (ROS기반)
- 비전-라이다 센서의 보정 기술 개발
– 체크보드를 이용한 간편한 센서 보정
– 비전센서와 카메라 간의 변환관계 보정
– 카메라-라이다 융합 정보 획득에 적용

카메라영상에 투영된 VLP-16 라이다 데이터 및 오리지널 점군 데이터
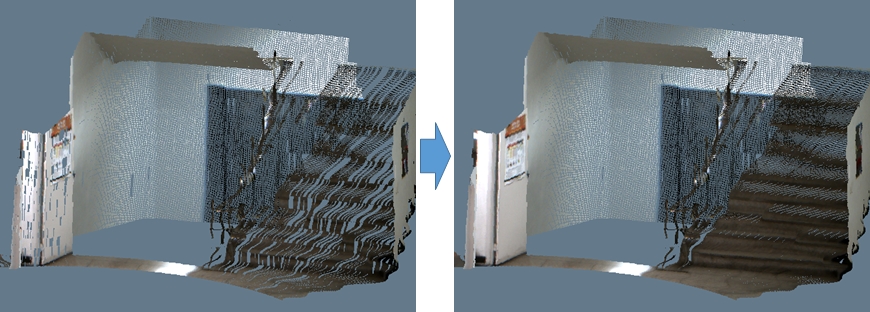
왼쪽: 보간법을 이용한 업샘플링 오른쪽: 제안 방법을 이용한 업샘플링
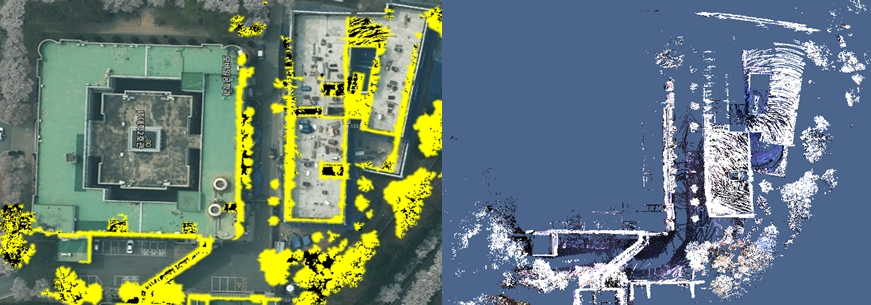
실외 빌딩주변의 3차원 맵생성 결과