School of Electronics Engineering, Kyungpook National University, South Korea
2차원 라이다와 단일 카메라 융합에 기반한 3차원 전방향 공간 스캐닝 및 업샘플링
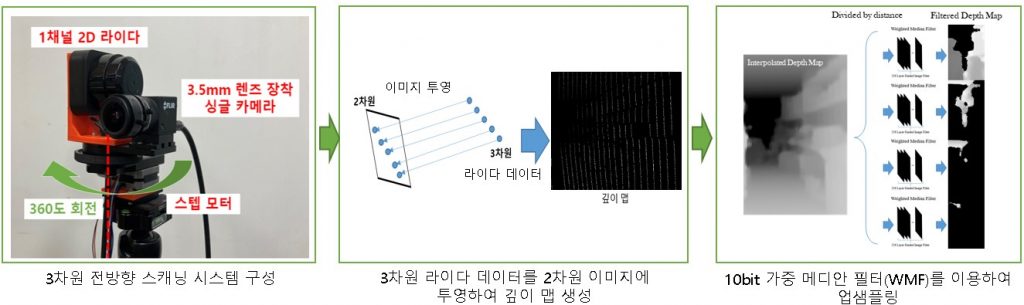
카메라, 2차원 라이다, 스텝 모터를 이용한 전방향 스캐닝 시스템 제작 – 광각 렌즈를 장착한 카메라와 수평축으로 90도 회전시킨 2차원 라이다를 동일 선상에 위치 – 스텝 모터를 이용해 수직축으로 스테이지를 360도 회전하여 데이터 획득
카메라와 라이다간 보정 – 카메라로 여러 시점에서의 체스보드 이미지를 획득, PnP(Perspective-n-Point) 알고리즘을 통해 3차원 체스보드 평면 추출 – 라이다에서 획득한 3차원 데이터에서 체스보드 평면 추출 – ICP(Iterative Closest Point) 알고리즘을 이용하여 두 좌표계를 보정
데이터 업샘플링 – 3차원 라이다 데이터를 2차원 이미지에 투영하여 깊이 지도 생성 – 깊이 지도 보간을 위한, 선택된 픽셀과 인접한 라이다 데이터의 점 선택 – 선택된 점들을 이용하여 거리에 따른 깊이 지도 보간을 통하여 1차 업샘플링 – WMF(Weighted Median Filtering)을 실시하여 2차 업샘플링